
CHIRURGIA
CHIRURGIA.
– Laparoscopia. Strumentario. NOTES. SILS. Chirurgia transanale. Elettrochirurgia. Ultrasuoni. Chirurgia robotica. Bibliografia
Tra la fine del 20° sec. e l’inizio del 21° le moderne tecniche di c. hanno conosciuto un’importante evoluzione dovuta alla sperimentazione e allo sviluppo tecnologico che hanno portato alla produzione di strumenti più precisi, più efficaci e più ergonomici. Alcuni esempi delle novità introdotte nell’ultimo decennio sono riportati di seguito.
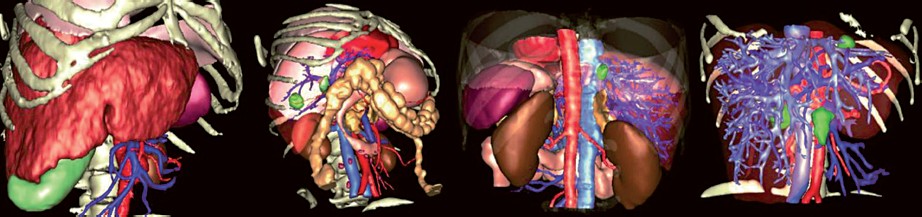
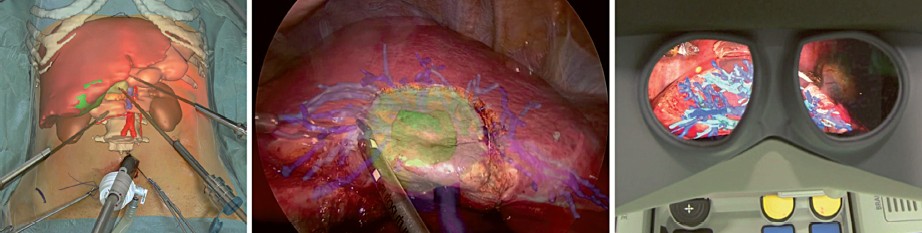
Laparoscopia. – In questo settore, la principale evoluzione nelle apparecchiature per l’acquisizione delle immagini e la visione prevede che tutte le novità impiegate in ambito televisivo siano trasferite in sistemi video a cosiddetta alta definizione (HD, High Definition), con un notevole miglioramento nella visualizzazione, sullo schermo in sala operatoria, delle immagini acquisite all’interno delle cavità corporee. L’impiego della più recente tecnologia tridimensionale (3D) restituisce la dimensione della profondità che, propria della visione diretta e possibile sinora solo nella c. tradizionale, si era persa con la visione bidimensionale classica degli schermi inizialmente disponibili per le procedure laparoscopiche (Sahu, Mathew, Reddy 2014). Questa opzione prevede l’impiego da parte del chirurgo di speciali occhiali che interpretano l’immagine elaborata dallo schermo, acquisendo appunto la profondità di campo. Il vantaggio principale è una migliore precisione dei movimenti, con conseguenti maggiore accuratezza nella dissezione e riduzione dei rischi di lesione iatrogena. A tal proposito, un’evoluzione ulteriore risiede nei sistemi, in gran parte ancora sperimentali, di realtà aumentata, ovvero sistemi di resa di immagine che sono in grado, su specifici visori in dotazione al chirurgo o direttamente sullo schermo presente in sala, di elaborare, insieme alla classica visione anatomica, anche informazioni aggiuntive sulla struttura di un organo e sulla localizzazione esatta di una lesione da asportare (Soler, Nicolau, Pessaux et al. 2014; López-Mir, Naranjo, Fuertes et al. 2013). Questi sono il risultato di software in grado di operare una ricostruzione di immagini di tomografia assiale computerizzata o di risonanza magnetica, acquisite nel preoperatorio, che appunto ‘aumentano’ la realtà anatomo-chirurgica percepita dal chirurgo (figg. 1 e 2). Vengono inoltre elaborati alcuni parametri fisici del paziente che, insieme a dettagli anatomici aggiuntivi, rendono l’intervento più agevole e molto più sicuro dal rischio di lesione iatrogena.
Strumentario. – Lo sviluppo tecnologico presentato nel-l’ultimo decennio dallo strumentario chirurgico per procedure laparoscopiche ha portato la laparoscopia sempre più vicina alla c. robotica, in termini di precisione e di aumento dei gradi di libertà, ovvero dei movimenti degli strumenti possibili nello spazio. La mano umana rappresenta il modello di riferimento che la tecnologia degli strumenti chirurgici di moderna generazione deve considerare e migliorare. In particolare questo riguarda gli strumenti articolabili nella loro porzione terminale, in uso nella c. robotica, che esprimono sette gradi di libertà (sei dei quali indicano i movimenti lungo le coordinate dello spazio, mentre il settimo grado è dovuto alla capacità prensile del robot) e 90° di articolazione. Anche le suturatrici meccaniche, in prevalenza impiegate nella sintesi di organi cavi quali l’intestino, hanno presentato nell’ultimo decennio un’importante evoluzione. Queste sono attualmente in grado di essere articolate nella loro porzione terminale con un’angolazione tale da permettere di raggiungere anche recessi addominali stretti e profondi quale lo scavo pelvico, per il trattamento di neoplasie della porzione distale del retto. Questa opzione, specie nella c. laparoscopica, diviene fondamentale per una corretta sutura del moncone rettale e per il confezionamento di un’anastomosi regolare e continente. Inoltre, alcune di queste suturatrici presentano una differente disposizione dei punti metallici, con una terza linea aggiuntiva, garantendo, dopo applicazione sul tessuto, una migliore tenuta della sutura meccanica (van Vugt, Tegels, Derikx et al. 2015). In alcuni dispositivi è possibile applicare sulla regione anastomotica dei supporti in materiale biocompatibile riassorbibile, favorenti la tenuta e la capacità di limitare la filtrazione del contenuto intestinale. Anche i fili di sutura hanno presentato un importante sviluppo tecnologico, soprattutto per l’impiego in c. laparoscopica. In particolare alcuni fili hanno dentellature per tutta la loro lunghezza e un blocco finale riassorbibile che permettono un autoancoraggio del filo senza necessità di nodi di bloccaggio. Questo, nonostante il miglioramento dell’esperienza nella sutura e nel confezionamento di nodi intracorporei, rende alcune procedure più rapide, garantendo peraltro una maggiore tensione nelle suture continue, che altrimenti potrebbe pregiudicare l’impermeabilità di un’anastomosi.
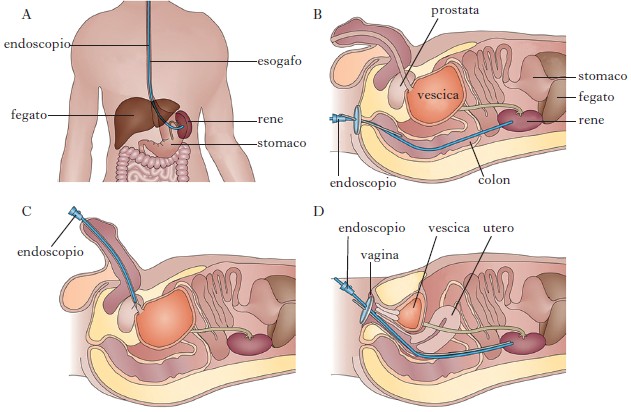
NOTES. – La c. endoscopica transluminale attraverso orifizi naturali (NOTES, Natural Orifice Transluminal Endoscopic Surgery) impiega strumentario endoscopico flessibile al di fuori dell’apparato digerente, per lo svolgimento di procedure chirurgiche all’interno della cavità addominale, con accesso attraverso orifizi naturali quale il fornice vaginale o la bocca, e penetrazione nel peritoneo attraverso lo stesso apparato digerente al livello del colon-retto o dello stomaco (Yagci, Kayaalp 2014; Daher, Chouil lard, Panis 2014; fig. 3). Dopo le prime applicazioni sperimentali della NOTES nel modello animale nel 2004, la prima appendicectomia transgastrica risale al 2006 e al 2007 la prima colecistectomia transvaginale. Nel 2015 la tecnica viene impiegata per procedure base come la colecistectomia e l’appendicectomia e si fanno le prime esperienze di sigmoidectomia, splenectomia e c. bariatrica. Alla NOTES sono riconosciuti dalle prime evidenze alcuni vantaggi quali il miglioramento della convalescenza postoperatoria, minore rischio di sviluppo di aderenze postoperatorie e una riduzione del tasso di infezione. Gli strumenti impiegati sono dotati di canali operativi duplici o multipli, nel cui contesto sono inseriti strumenti miniaturizzati. Questi sono dotati di branche terminali con uno o più segmenti articolabili. Quelli dotati di due segmenti hanno quattro gradi di libertà: due deflessioni, translazione assiale e rotazione, in aggiunta a due deflessioni che agiscono intorno al punto di incisione. La procedura, differentemente dall’endoscopia classica nella quale la visione e tutte le procedure operative sono svolte dal solo operatore, prevede l’azione bimanuale del chirurgo operatore e l’intervento di un assistente che è deputato all’articolazione dell’ottica e all’utilizzo di un ulteriore canale operatore normalmente occupato da una pinza da presa, impiegata per l’ancoraggio e la trazione dei tessuti. La procedura in sé è estremamente complessa e richiede una lunga curva di apprendimento, in particolare legata alla difficile ergonomia della strumentazione, tanto più complessa quanto più sviluppati e articolabili diventano gli strumenti, grazie al loro progressivo sviluppo tecnologico. Alla NOTES pura è possibile associare, in una tecnica ibrida definita MANOS (Minilaparoscopy Assisted Natural Orifice Surgery), l’impiego di canali operatori (trocar) transparietali con tecnica laparoscopica per l’introduzione in cavità di pinze da presa o altri strumenti che sono di ausilio al chirurgo operatore.
SILS. – La c. laparoscopica con singola incisione (SILS, Single Incision Laparoscopic Surgery) è una tecnica che, rispetto al classico strumentario da 5 mm, impiega strumenti dedicati che vengono inseriti attraverso i tre o quattro canali presenti nell’unico dispositivo di accesso transparietale (port) in sede ombelicale, per lo svolgimento di procedure chirurgiche all’interno della cavità addominale senza ricorso a incisioni aggiuntive (Daher, Chouillard, Panis 2014). Anche alla SILS vengono riconosciuti vantaggi quali il miglioramento della convalescenza postoperatoria, un minore rischio di sviluppo di aderenze postoperatorie e una riduzione del tasso di infezione. Gli strumenti operatori nella laparoscopia classica sono disposti nello spazio operatorio secondo il principio della triangolazione, ovvero impiegando l’ottica in posizione arretrata rispetto agli strumenti, per garantire la massima visione del campo operatorio, e gli strumenti operatori in posizione più avanzata, con orientamento tale da ottimizzarne l’azione sul tessuto bersaglio. Nella SILS l’utilizzo di un unico port transparietale impone che gli strumenti operatori, per non risultare paralleli e quindi inefficaci da un punto di vista operativo, debbano essere posizionati con orientamento incrociato, al livello del fulcro del port, e quindi distanziati nei loro estremi tanto per poter interagire nell’atto chirurgico. Questa disposizione fa sì che la mano destra controlli lo strumento chirurgico che agisce da sinistra rispetto all’organo bersaglio e viceversa la mano sinistra quello che agisce da destra. Questa lateralità invertita comporta per il chirurgo operatore una notevole complessità tecnica per la coordinazione motoria alterata e per il controllo dell’articolazione degli strumenti anche essi dotati, come per la NOTES, di segmenti multipli e di una crescente disponibilità di gradi di libertà aggiuntivi rispetto agli strumenti rigidi retti. Per far fronte a questa particolarità, che impone una curva di apprendimento maggiore rispetto alle normali procedure laparoscopiche e una certa scomodità ergono-mica per l’operatore, l’evoluzione tecnologica ha introdotto strumenti flessibili articolabili con doppia curvatura, che risultano nel campo operatorio a giusta distanza e con un corretto orientamento, tali da essere manovrati dalle mani dell’operatore in modo coerente con la lateralità degli strumenti stessi.
Chirurgia transanale. – La TEM (Transanal Endoscopic Microsurgery) nasce come evoluzione tecnologica della classica procedura transanale descritta da sir Alan Parks negli anni Cinquanta del 20° sec., che impiega uno specifico divaricatore anale per introdurre, sotto visione diretta, strumentario chirurgico ordinario volto all’asportazione di neoplasie benigne e maligne in stadio iniziale limitate al terzo distale del retto, senza possibilità di procedere più prossimalmente. La TEM impiega uno specifico rettoscopio rigido dotato di canali operatori attraverso cui è possibile introdurre un’ottica, una fonte di gas per operare la distensione del viscere e gli strumenti operatori in grado di procedere all’asportazione di neoplasie rettali, con la possibilità di aggredire anche lesioni posizionate più prossimalmente. Eseguita secondo i protocolli internazionali nei tumori T1 (non invasivi) e in pazienti non candidabili all’intervento di resezione del retto, la TEM prevede l’escissione locale della lesione a tutto spessore, fino al tessuto linfoadiposo perirettale. L’esatta definizione istologica del preparato chirurgico asportato indica il corretto trattamento adiuvante postoperatorio. La TAMIS (TransAnal Minimally Invasive Surgery) è una tecnica di c. transanale introdotta nel 2010 ed evolutiva rispetto alla TEM. Prevede l’applicazione del dispositivo di accesso della tecnica SILS (single port) al livello anale, attraverso il quale sono impiegati strumenti laparoscopici per l’esecuzione di interventi sul retto, in particolare l’asportazione di tumori benigni o di tumori maligni in stadio iniziale come per la TEM (Martin-Perez, Andrade-Ribeiro, Hunter et al. 2014). In alcune esperienze si è proceduto con tecnica TAMIS a resezione del retto con asportazione totale del mesoretto e all’applicazione della tecnica con tecnologia robotica. Gli interventi con impiego del robot sono ancora sporadici, ma i risultati sono soddisfacenti. La resezione del retto con asportazione del mesoretto con tecnica mini-invasiva transanale offre importanti vantaggi per quanto riguarda il trattamento di pazienti con pelvi stretta o affetti da obesità maggiore, condizioni che rendono particolarmente complessa la procedura per via aperta o laparoscopica classica. La procedura è tuttavia gravata da una rilevante difficoltà tecnica e da una correlata lunga curva di apprendimento.
Elettrochirurgia. – Lo strumento di riferimento per l’impiego di energia elettrica in c. è l’elettrobisturi, alimentato da un generatore di segnali ad alta frequenza (nel campo dei 0,4-2 MHz), chiamato anche generatore in radiofrequenza. Di ampio impiego in ambito clinico, permette un’azione fondamentale di taglio e coagulo, ma è caratterizzato da un’importante dispersione termica che potrebbe danneggiare i tessuti vicini a quelli su cui l’energia è applicata direttamente. A temperatura inferiore ai 100 °C gli effetti biologici corrispondono all’evaporazione dell’acqua contenuta nelle cellule con un effetto emostatico; a temperatura superiore ai 100 °C a distruzione della cellula con effetto di taglio sul tessuto; a temperatura molto superiore ai 100 °C a carbonizzazione.
La diretta evoluzione dell’elettrobisturi è stata l’applicazione della radiofrequenza a moderni dispositivi che dalla fine del secolo scorso sono impiegati per la funzione di emostasi mediante sintesi tissutale. Questi sono in grado di identificare l’impedenza dei tessuti, modulando in conseguenza la distribuzione automatica della radiofrequenza necessaria alla sintesi, fino a indicare con un segnale acustico il completamento del processo e quindi la possibilità di rilasciare la presa della pinza. Gli ultimi dispositivi entrati in commercio presentano una lama scorrevole a comando che, azionato dopo la sintesi tissutale, permette una sezione esangue, con notevole risparmio di tempo perché non è necessario rimuovere lo strumento e sostituirlo con un tagliente. Tutti gli strumenti a radiofrequenza presentano un’applicazione in c. sia aperta sia mini-invasiva, con la possibilità di ricorrere a manipoli di diversa lunghezza e calibro utilizzabili nelle varie procedure.
L’efficacia del dispositivo garantisce la sintesi con emostasi di vasi fino a un calibro anche di 7 mm, con il vantaggio di limitare la dispersione termica entro i 2 mm dal punto di applicazione, in maniera analoga, ma evolutiva, a quanto precedentemente osservato per la pinza bipolare a radiofrequenza che, mantenendo il campo elettrico tra le due branche dello strumento e non, come per l’elettrobisturi classico, dalla punta alla piastra di scarico applicata sulla cute del paziente, limita appunto la dispersione termica e il conseguente danno ai tessuti circostanti.
Ultrasuoni. – Gli ultrasuoni sono onde meccaniche a frequenze superiori a quelle mediamente udibili dall’orecchio umano. La frequenza convenzionalmente utilizzata per discriminare onde soniche da onde ultrasoniche è fissata in 20 kHz. Gli ultrasuoni trovano impiego in ambito medico e industriale, essendo ampiamente utilizzati in ecografia ma anche in c., con lo sviluppo di dispositivi definiti bisturi a ultrasuoni, nei quali l’energia elettrica viene convertita in energia meccanica a frequenza ultrasonica grazie a un sistema di cristalli piezoelettrici. La piezoelettricità è la caratteristica di alcuni cristalli di generare una differenza di potenziale quando sono soggetti a una deformazione meccanica. Il cristallo si comporta come un condensatore al quale è stata applicata una differenza di potenziale elettrico. Il bisturi armonico è costituito da un generatore e da un manipolo che ha una pinza con lama in titanio, capace di oscillare con un breve movimento longitudinale a elevata frequenza (circa 55.000 volte al secondo). Questa oscillazione provoca sul tessuto con il quale viene in contatto due effetti: l’esplosione delle cellule per la vaporizzazione delle molecole di acqua in esse contenute (effetto di cavitazione) e un effetto meccanico, determinato dall’oscillazione della lama che provoca la distruzione anche dei tessuti fibrosi più resistenti. Questo strumento, mediante una vibrazione a 55.500 cicli/sec., determina la sezione del tessuto e contemporaneamente induce un’obliterazione dei vasi dovuta alla denaturazione delle molecole di collagene, formando un coagulo alla temperatura di 50-100 °C, inferiore a quella raggiunta dall’elettrobisturi (100-400 °C), e garantendo un’efficace emostasi con minima dispersione termica. Il bisturi a ultrasuoni presenta un’applicazione in c. sia aperta sia mini-invasiva, con la possibilità di ricorrere a manipoli di diversa lunghezza e calibro utilizzabili nelle varie procedure. L’efficacia del dispositivo garantisce la sintesi con emostasi anche di vasi fino a un calibro di 5 mm, con il vantaggio di limitare la dispersione termica entro 1 mm dal punto di applicazione. L’effetto complessivo è combinato con sezione, taglio, emostasi e dissezione, quest’ultima possibile grazie alla morfologia delle lame che per curvatura e calibro sono simili a un ordinario dissettore da c. aperta.
Chirurgia robotica. – Questo settore ha presentato nell’ultimo decennio un importante sviluppo sia in ambito tecnologico sia in termini di diffusione dei sistemi e di ampliamento delle indicazioni. Da circa 500 procedure eseguite nel 1999 si è passati a circa 7000 nel 2011 e a 10.000 nel 2013, con una previsione di almeno 15.000 procedure nel 2020. Questo corrisponde a una crescita annua di circa il 20-30% che, pur non essendo ancora disponibile un registro nazionale di procedure robotiche in Italia, permette una stima complessiva di circa 50.000 interventi eseguiti dall’introduzione di questa tecnologia. L’Italia vanta, rispetto ad altre nazioni europee, un’importante diffusione sul proprio territorio di sistemi robotici, con 64 da Vinci®, presenti prevalentemente nelle regioni settentrionali con 35 unità, rispetto al Centro e al Sud con le isole che ne contano rispettivamente 19 e 10. I dati sono in linea con Francia e Germania rispetto a un totale di dispositivi di circa 2800 unità, delle quali solo negli Stati Uniti se ne contano circa 2000. Questi dati rappresentano l’enorme diffusione ormai raggiunta dalla robotica in chirurgia. Alcuni vantaggi sono indiscussi e tra essi i prevalenti rimangono la precisione dell’atto chirurgico, l’assenza di tremore fisiologico, l’ampliamento a sette gradi di libertà per gli strumenti, la magnificazione video ulteriormente potenziata da sistemi in HD e 3D. Si è osservato peraltro un progressivo impegno a migliorare alcune delle limitazioni della robotica, come la mancanza di feedback tattile rispetto alla c. tradizionale e alla c. mini-invasiva con il potenziamento delle interfacce aptiche (ossia il dispositivo che permette di manovrare un robot e riceverne sensazioni tattili in risposta), al suo controllo deputate, insieme al sempre più significativo sviluppo della tecnologia degli strumenti articolabili. La procedura maggiormente eseguita con il sistema da Vinci® rimane la prostatectomia radicale, che in Italia ormai circa per il 20% dei casi viene eseguita con questa metodica. Ove disponibile, anche in molte procedure di c. generale, da quella del retto a quella del giunto gastroesofageo, alle procedure bariatriche, si è raggiunto un pieno perfezionamento della tecnica e dell’esperienza dei gruppi dedicati. Il problema ancora rilevante è relativo ai costi non solo di acquisto e installazione, ma soprattutto di assistenza e manutenzione, che rendono necessario, soprattutto nello scenario attuale, razionalizzare l’impiego della tecnologia robotica limitandolo a strutture di alta specializzazione dove la sua fruizio ne sia multispecialistica, con una conseguente ottimizzazione dei costi.
Bibliografia: F. López-Mir, V. Naranjo, J.J. Fuertes et al., Design and validation of an augmented reality system for lap aroscopic surgery in a real environment, «BioMed research international», 2013; R. Daher, E. Chouillard, Y. Panis, New trends in colorectal surgery: single port and natural orifice techniques, «World journal of gastroenterology», 2014, 20, 48, pp. 18104-20; B. Martin-Perez, G.D. Andrade-Ribeiro, L. Hunter et al., A systematic review of transanal minimally invasive surgery (TAMIS) from 2010 to 2013, «Techniques in coloproctology», 2014, 18, 9, pp. 775-88; D. Sahu, M.J. Mathew, P.K. Reddy, 3D laparos copy - Help or hype; initial experience of a tertiary health centre, «Journal of clinic and diagnostic research», 2014, 8, 7, NC01-3; L. Soler, S. Nicolau, P. Pessaux et al., Real-time 3D image reconstruction guidance in liver resection surgery, «Hepatobiliary surgery and nutrition», 2014, 3, 2, pp. 73-81; M.A. Yagci, C. Kayaalp, Transvaginal appendectomy: a systematic review, «Minimally invasive surgery», 2014; J.L. van Vugt, J.J. Tegels, J.P. Derikx et al., First experiences with the Radial Reload with Tri-staple™ technology in low rectal surgery, «International journal of surgery», 2015, 14, pp. 23-27.