connessionismo
connessionismo
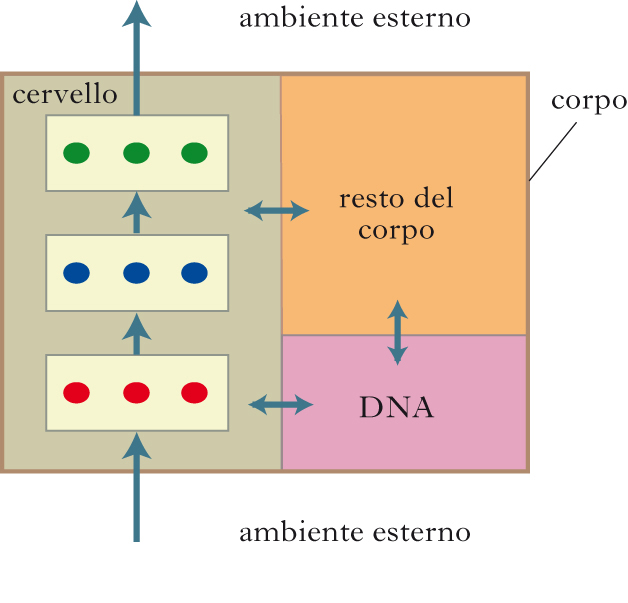
Metodo di studio del comportamento degli animali, inclusi gli esseri umani, basato su due presupposti metodologici: primo, quello di avvalersi di artefatti nella costruzione delle teorie, sulla base dell’ipotesi che se l’artefatto si comporta come il fenomeno studiato, risulta validata la teoria usata per costruire l’artefatto. Questo presupposto, nel caso del c., si traduce nella costruzione di robot fisici o virtuali (simulazioni al computer). Il secondo presupposto è che il comportamento dei robot deve essere controllato da un sistema artificiale contraddistinto da caratteristiche simili a quelle del cervello, ossia del sistema che controlla il comportamento degli animali viventi. Il cervello è formato da una rete di neuroni collegati tra loro da sinapsi, e il suo funzionamento viene simulato costruendo reti neurali artificiali formate da unità che riproducono i neuroni, e da connessioni che riproducono i collegamenti sinaptici tra i neuroni. La rete neurale possiede unità di input sensoriale che codificano l’informazione proveniente dall’ambiente esterno e che sono collegate a uno o più strati di unità interne, le quali rappresentano i neuroni che costituiscono la corteccia cerebrale e le altre parti del sistema nervoso. Queste unità interne, a loro volta, sono collegate con le unità di output motorio che controllano i movimenti con cui il cervello risponde agli stimoli sensoriali.
Studio dell’apprendimento
Uno dei fenomeni più importanti studiati dal c. è l’apprendimento, ovvero il processo tramite il quale un animale acquisisce le capacità che possiede. Il modo in cui un animale risponde agli stimoli sensoriali dipende dal livello quantitativo dei collegamenti sinaptici presenti tra i neuroni del suo cervello. In una rete neurale artificiale, questo livello viene simulato assegnando a ciascuna connessione un ‘peso’ quantitativo. Il c. simula l’apprendimento partendo da una rete neurale con pesi sinaptici assegnati a caso e che quindi risponde agli stimoli sensoriali in modo non corretto. Questi pesi sinaptici, però, si modificano gradualmente nel corso dell’esperienza fino a che la rete neurale non mostra di aver appreso il comportamento desiderato.
Sviluppi del connessionismo
Dagli anni Ottanta del secolo scorso il c. ha compiuto notevoli progressi, che hanno permesso di dar conto di molti altri fenomeni relativi al comportamento. Il primo passo avanti è stato la formulazione di modelli di vita artificiale, ossia il tentativo di studiare tutti i fenomeni biologici, e non solo il cervello e l’apprendimento, simulandoli al computer. Questo ha permesso al c. di comprendere anche l’altro modo in cui gli animali acquisiscono i loro comportamenti, cioè non attraverso l’apprendimento durante la vita dell’individuo, ma nel corso delle generazioni tramite l’evoluzione. L’evoluzione naturale viene simulata creando una popolazione di reti neurali artificiali con pesi sinaptici assegnati a caso, dotando ogni rete di un genotipo che codifica i suoi pesi sinaptici, e facendo riprodurre la rete madre con la creazione di una nuova rete figlia con lo stesso genotipo della rete madre; tuttavia, tale genotipo viene modificato parzialmente e in modo casuale (per simulare le mutazioni genetiche casuali che avvengono in natura). La riproduzione selettiva delle reti migliori e le modifiche casuali nei genotipi ereditati producono la progressiva acquisizione del comportamento desiderato nel corso delle generazioni. La seconda innovazione del c. è stato il suo collegamento con la robotica. Le reti neurali inizialmente erano cervelli privi di corpo, e gli stimoli che giungevano alle loro unità di input venivano decisi dallo sperimentatore. I robot sono invece artefatti che simulano il corpo degli animali e il loro comportamento. Le reti neurali oggi vengono usate come sistemi di controllo del comportamento dei robot, e questo ha permesso di mostrare come il comportamento dipenda non solo dal cervello ma anche dal corpo, ossia dalla forma e dalle dimensioni del corpo stesso e dagli organi sensoriali e motori dell’animale. Inoltre i robot interagiscono con l’ambiente fisico, e quindi i loro stimoli non sono più decisi dallo sperimentatore ma dipendono dalle caratteristiche dell’ambiente in cui vive il robot e dai suoi movimenti in quell’ambiente. Il terzo passo avanti è avvenuto quando la robotica ha iniziato a tener conto del fatto che gli animali hanno non solo una morfologia esterna del corpo, ma anche organi e sistemi interni (sistema endocrino, sistema immunitario, muscoli lisci degli organi interni, ecc.); il cervello animale quindi interagisce non solo con l’ambiente esterno ma anche con tali organi e sistemi interni. Sono queste ultime interazioni che spiegano le componenti motivazionali ed emotive del comportamento, le diversità di carattere tra gli individui, le malattie di tipo psichiatrico e, più in generale, i disturbi psicologici. Un ulteriore avanzamento è costituito dal fatto che, mentre inizialmente le reti neurali erano molto semplici rispetto alla complessità del cervello reale, oggi si comincia a costruire reti neurali artificiali che riproducono con maggiore fedeltà le diverse parti del cervello e i loro collegamenti. In tal modo i modelli connessionisti sono in grado di confrontarsi non solo con i dati empirici relativi al comportamento, e quindi con la psicologia, ma anche con quelli relativi all’architettura e al modo di funzionare del cervello, in partic. i dati delle tecniche di imaging cerebrale funzionale, e quindi anche con le neuroscienze. Un ultimo elemento di novità, infine, è costituito dall’emergere di una robotica sociale, ottenuta tramite la costruzione di gruppi di robot che interagiscono tra loro e, così facendo, riproducono quei fenomeni che vanno al di là del comportamento dei singoli individui. La robotica collettiva e la swarm robotics (robotica a sciame) simulano per es. la socialità elementare di insetti e di altri animali semplici, sulla base del fatto che tutti gli individui hanno genotipi sostanzialmente identici e quindi tendono naturalmente a cooperare tra loro. Per simulare invece la più complessa socialità degli esseri umani, che interagiscono in gruppi formati da individui con genotipi diversi, e che quindi possono dar luogo sia a cooperazione sia a competizione, è necessaria una vera e propria robotica sociale, che oggi (2010) è appena gli inizi.