intorno
intorno
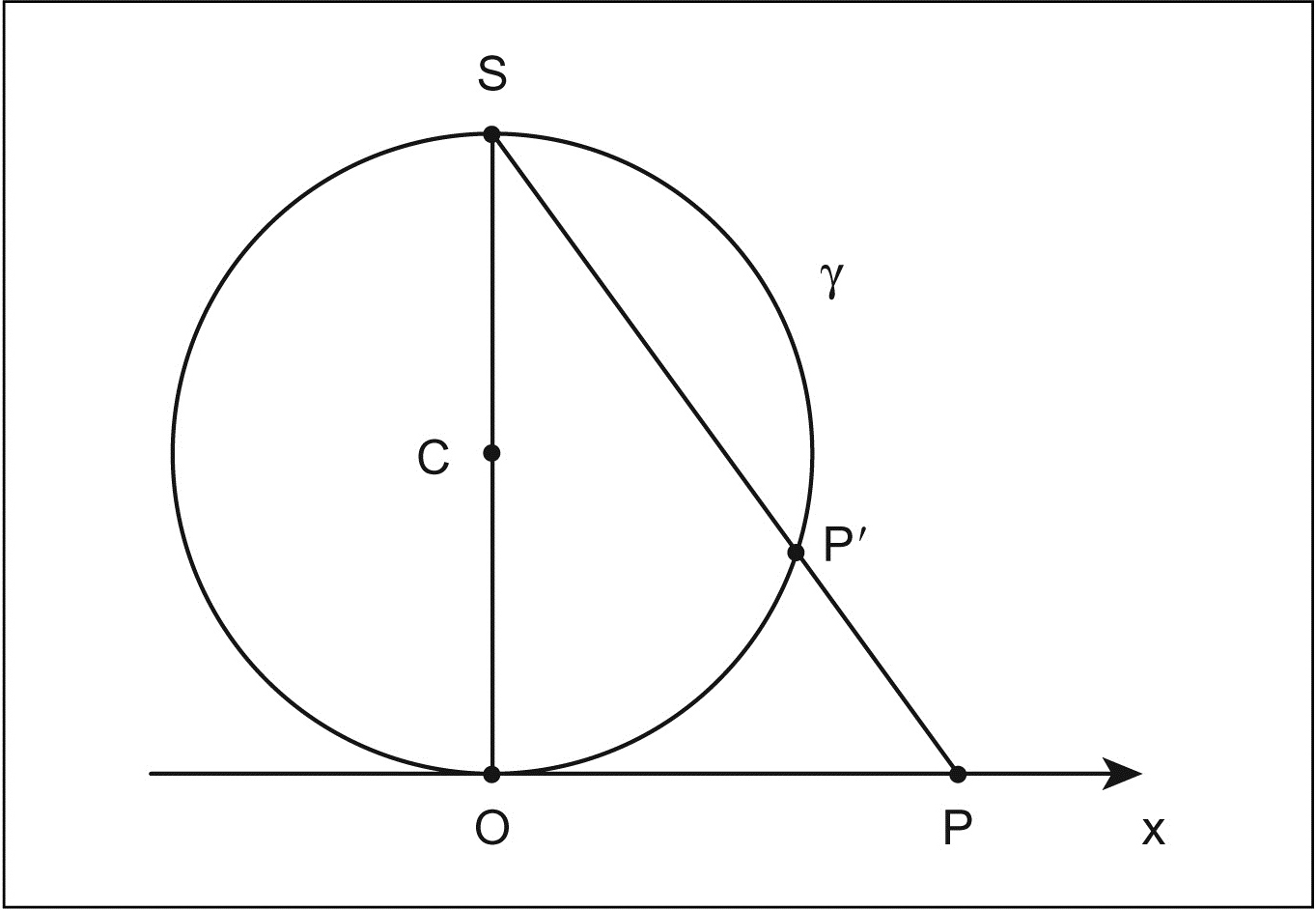
intorno in analisi, concetto che allude alla totalità di elementi “vicini” a un elemento dato. Poiché nella retta reale è definita la distanza tra due punti P1 e P2 come la lunghezza (senza segno) del segmento P1P2, si definisce intorno (simmetrico) di un qualsiasi punto P0 (al finito) dell’asse x l’insieme dei punti P la cui distanza da P0 non supera un certo r > 0; cioè, dette rispettivamente x e x0 le ascisse di P e P0, l’insieme dei numeri reali x per cui si verifica |x − x0| ≤ r oppure l’analoga disuguaglianza stretta, cioè escludendo dall’intorno i suoi estremi. Più in generale, si considera intorno non simmetrico di P0, cioè con estremi non equidistanti da esso, un qualsiasi intervallo (a, b) tale che a < x0 e b > x0; anzi, ponendo anche il segno di uguale in una delle due disuguaglianze si definiscono intorni unilaterali (destro o sinistro) in cui P0 coincide con uno degli estremi. Il concetto di intorno così definito si estende anche al caso in cui si consideri non un punto P0 al finito, bensì un punto all’infinito. Si può infatti osservare che i numeri reali possono anche rappresentarsi su una curva chiusa i cui punti siano posti in corrispondenza biunivoca con i punti della retta; per esempio su una circonferenza γ tangente all’asse x nell’origine O, su cui i punti vengano proiettati dal punto S della circonferenza diametralmente opposto a O. In tal modo al punto all’infinito dell’asse x corrisponde il punto S di γ e a un intorno di S sulla circonferenza corrisponde la parte della retta x esterna a un certo intervallo (−ω1, ω2). Si definisce allora tale parte della retta x come intorno del punto all’infinito della retta stessa. Se si considera ω1 = ω2 = ω, l’intorno è caratterizzato dalla disuguaglianza |x| ≥ ω. In R una disuguaglianza di questo tipo è definita appunto come intorno dell’infinito.
L’estensione del concetto a R2 porta a definire l’intorno circolare di un punto P0 come la totalità dei punti aventi da esso distanza non superiore a un fissato numero reale r non negativo, caratterizzato da una disuguaglianza analoga a quella che caratterizza l’intorno unidimensionale:
In tale caso P0 e r sono rispettivamente detti centro e raggio dell’intorno. L’estensione a Rn porta a definire intorni circolari di un punto nel corrispondente spazio n-dimensionale. Il concetto di intorno non si limita tuttavia a intorni circolari, ma va esteso a un qualsiasi dominio comprendente il punto P0 al suo interno: nel caso bidimensionale, per esempio, è spesso utile riferirsi a intorni rettangolari definiti da a ≤ x ≤ b, α ≤ y ≤ β (con lati paralleli agli assi coordinati), attraverso cui si definiscono intorni incapsulati come successive celle cn = (an ≤ x ≤ bn, αn ≤ y ≤ βn) (con n = 1, 2, 3, …) tali che, dato ad arbitrio ε > 0, si può sempre trovare n tale che bn − an < ε, βn − αn < ε (si dimostra che in tale caso esiste uno e un solo punto A interno a tutte le celle).
Il concetto di intorno non si limita comunque a Rn, ma si estende a un più generale spazio topologico. In uno spazio topologico X l’intorno di un punto x è un sottoinsieme U di X contenente un aperto A cui appartiene x o, in altre parole, tale che x sia interno a U. Una base di intorni di x è una famiglia F di intorni tale che ogni intorno U di x contenga un membro della famiglia. Per esempio, in uno spazio metrico una base di intorni di un punto x è formata dagli intorni circolari Br = {y : d(x, y) < r, con r > 0}, con cui è stato precedentemente introdotto il concetto di intorno. L’insieme degli intorni di un punto costituisce un → filtro.