matrice hessiana
matrice hessiana
matrice hessiana di una funzione ƒ: Rn → R, due volte differenziabile, è la matrice H delle sue derivate seconde:
Il determinate della matrice hessiana è detto determinante hessiano (o semplicemente l’hessiano) di ƒ. La traccia della matrice H è il laplaciano di ƒ. Per il teorema di → Schwarz, se ƒ è di classe C 2, allora H è una matrice simmetrica. Se dx ∈ Rn indica il vettore incremento delle variabili indipendenti, il differenziale secondo di ƒ è dato da

per cui lo sviluppo di → Taylor di ƒ nell’intorno di un punto x è dato da
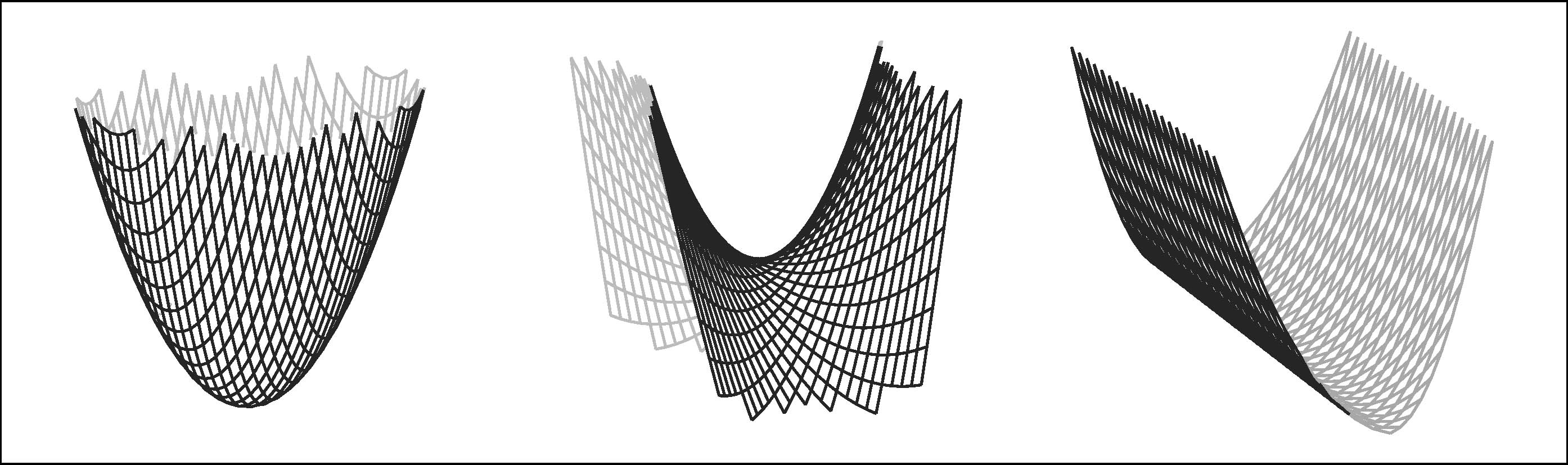
dove Dƒ(x) è la → matrice jacobiana di ƒ. Il segno della forma quadratica espressa dal differenziale secondo consente lo studio della concavità del grafico di ƒ nel punto x: precisamente se tale forma è definita positiva (negativa) il grafico giace, in un intorno di x, al di sopra (sotto) dell’iperpiano tangente, mentre se è indefinita il grafico attraversa tale iperpiano. In particolare, se il punto x è di stazionarietà (Dƒ(x) = 0), si avrà un minimo (massimo) relativo o un punto di sella. La verifica può essere fatta calcolando gli autovalori di H: se sono tutti concordi, la forma è definita; se vi è almeno un autovalore nullo e gli altri concordi, la forma è semidefinita; se ve ne sono di segni opposti, è indefinita.
Nel caso di hessiana semidefinita, è necessario un ulteriore studio per stabilire se il grafico attraversa o no l’iperpiano tangente.
Nei seguenti esempi l’origine è un punto di stazionarietà:
1) la funzione ƒ(x, y) = x 2 + 2bxy + y 2 ha come matrice hessiana nell’origine
Poiché l’hessiano è det(H) = 4 − 4b2, se |b| < 1 la funzione ha un minimo nell’origine, se |b| > 1 ha una sella. Se b = 1, ƒ(x, y) = (x + y)2 e la funzione ha minimi relativi sulla retta x + y = 0 nel piano z = 0; analogamente per b = −1 li ha sulla retta y = −x;
2) la funzione ƒ(x, y) = x 2 + 2bxy + y 2 − (x − by)4 si comporta nello stesso modo della precedente per |b| ≠ 1, ma per b = ±1 attraversa nell’origine il piano z = 0;
3) la funzione ƒ(x, y, z) = cosx + yz ha
i cui minori principali di guida valgono −1, 0, 1, per cui il grafico attraversa nell’origine l’iperpiano tangente;
4) la funzione ƒ(x, y, z) = cosx − xy − y 2 + yz − 2z 2 ha
i cui minori principali di guida valgono −1, 1, −3, per cui ƒ(x, y, z) ha un massimo nell’origine (→ matrice, minore di una).
Un’applicazione alle curve algebriche si ha considerando la cosiddetta curva hessiana (o semplicemente hessiana) di una curva Γ di equazione (in coordinate omogenee) ƒ(x0, x1, x2) = 0. L’hessiana di Γ ha equazione det(H) = 0, e le sue intersezioni con Γ, se semplici, danno tutti e soli i punti di flesso di Γ.