
menti collettive
menti collettive
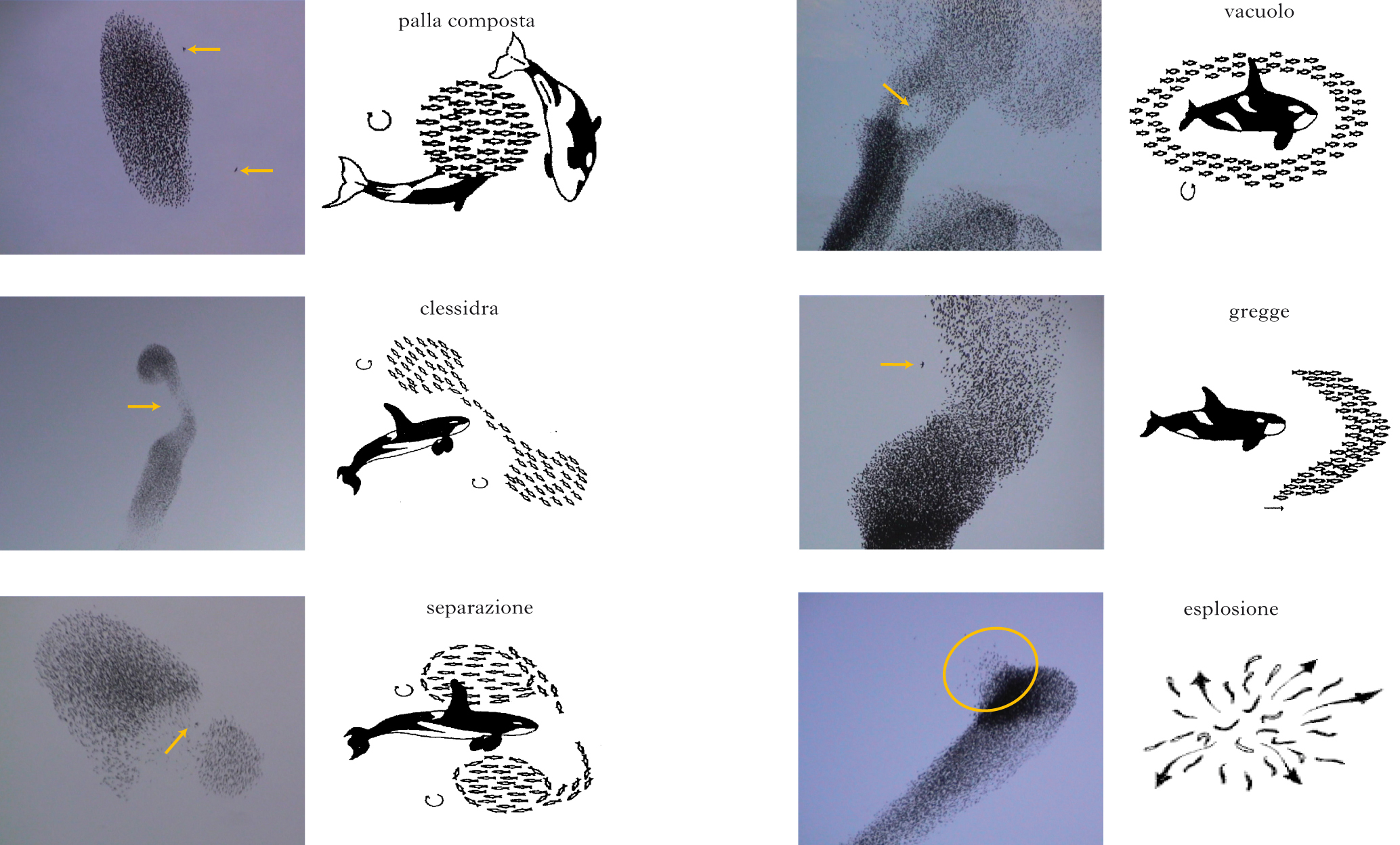
Sorta di connettività tra le menti di individui di alcune specie che risulta dalla sincronizzazione e dalla coesione del comportamento mostrata in specifiche circostanze. L’espressione è stata introdotta dal naturalista Edmund Selous nel tentativo di descrivere la stupefacente sincronia e coerenza dei gruppi di alcune specie animali. In effetti, chiunque osservi le evoluzioni di uno stormo di storni, un banco di pesci o uno sciame di insetti resta affascinato dalla sincronizzazione e coesione di migliaia di individui che sembrano muoversi ‘all’unisono’. Spesso queste evoluzioni sono causate dal tentativo del gruppo di sfuggire a un pericolo, per es. un predatore, e il gruppo appare come un organismo dotato di vita e intelligenza proprie, una vera e propria m. c. con proprietà emergenti rispetto alla semplice somma delle sue parti.

Comportamenti collettivi tra gli animali
Il comportamento collettivo è il risultato di regole comportamentali semplici, individuali e locali: ciascun individuo interagisce solo con individui a lui vicini senza cognizione precisa della struttura globale del gruppo e cerca di allineare la propria direzione del moto a quella dei vicini. Questa tendenza si propaga generando la coordinazione collettiva senza alcun controllo centralizzato, ossia senza un leader. Le decisioni del gruppo (una virata, un atterraggio) avvengono attraverso un’amplificazione di una fluttuazione locale. Per es., se un certo numero di individui superiore a una determinata massa critica cambia direzione, attraverso le regole locali il cambiamento si diffonde provocando un cambio di direzione globale. Tale coordinamento decentralizzato è noto come auto-organizzazione ed è assai diffuso nel regno animale. Uccelli, pesci e insetti danno luogo a evoluzioni straordinarie soprattutto per la loro possibilità di muoversi liberamente nelle tre dimensioni, ma vi sono numerosi esempi anche tra gli animali terrestri, che si muovono nelle due dimensioni, come zebre e bufali.
Comportamenti collettivi umani
Il comportamento collettivo auto-organizzato è diffuso nella specie umana in molti contesti come i fenomeni di affollamento, in cui grandi masse di individui devono evacuare una regione confinata (per es., dopo un concerto o una partita di calcio), il traffico pedonale e automobilistico, gli applausi alla fine di uno spettacolo e la hola messicana dei tifosi sportivi, la formazione di mode e flussi di opinione. In condizioni di forte sollecitazione è ragionevole ipotizzare che anche un essere umano utilizzi regole elementari, ma a elevata reattività e rapidità, piuttosto che elaborazioni che renderebbe l’azione più lenta.
Modelli teorici
Fisici, economisti, biologi hanno sviluppato modelli teorici e simulazioni al computer (detti modelli ‘ad agenti’) che specificano il comportamento di ciascun individuo con una serie di regole dinamiche. Formalmente ciascun individuo è rappresentato da un’equazione che ne descrive il moto nello spazio sulla base delle interazioni con i compagni secondo tre regole: non avvicinarsi troppo ai vicini per evitare collisioni; non allontanarsene troppo per non perdere coesione; muoversi nella direzione media dei vicini, per coordinarsi con essi. Queste regole determinano la posizione dell’individuo tra un istante e quello successivo. La prima regola indica una forza repulsiva a corto raggio che sposta l’individuo in direzione opposta agli individui troppo vicini. La seconda corrisponde a una forza attrattiva che agisce su scale più grandi e tende a riavvicinare l’individuo ai vicini se si allontana troppo. La terza è un fattore di allineamento che orienta l’individuo lungo la direzione di moto media dei suoi vicini modulandone la velocità. Questi tre elementi costituiscono gli ingredienti di tutti i modelli di moto collettivo in uccelli, pesci, insetti e mammiferi. Ciascun modello differisce a seconda di come vengono implementati e dei diversi sistemi da studiare (per es., uccelli rispetto a pesci). I modelli ad agenti si studiano attraverso simulazioni numeriche poiché l’insieme di equazioni è troppo complesso per una risoluzione matematica esatta. Ciascuna equazione è codificata in un algoritmo, implementato poi da un computer che simula una popolazione artificiale di individui che obbediscono alle regole impartite. Lo studio numerico dei modelli ha dimostrato come a partire da regole semplici e locali sia possibile ottenere un comportamento collettivo complesso, fornendo dunque una dimostrazione qualitativa di uno dei concetti portanti della teoria dell’auto-organizzazione. Gli aspetti quantitativi dipendono dai dettagli del modello, dal modo in cui le regole sono implementate e dal valore dei vari parametri (grandezza della zona di interazione, importanza dei vicini in base alla loro distanza, importanza dell’attrazione rispetto all’allineamento, ecc.). Gran parte degli studi teorici si è dedicata a esplorare varie possibilità, provando a cambiare leggermente le regole e i parametri per osservare quali tipologie di moto aggregato si possono ottenere in termini di forma, dinamica di gruppo e struttura interna. Studi empirici effettuati tra il 2006 e il 2008 da ricercatori coordinati dal fisico Giorgio Parisi su stormi di storni di migliaia di individui hanno consentito per la prima volta una valutazione più realistica dei modelli esistenti. L’analisi quantitativa dei dati ha infatti fornito misurazioni su grandezze sia di tipo morfologico (forma, volume, densità del gruppo), sia di tipo strutturale (posizioni relative degli individui; distanza minima fra individui e zona di repulsione; distribuzione spaziale degli individui), che però non trovano riscontro nei risultati dei modelli attuali, il che mostra come l’analisi teorica necessiti del supporto empirico. I modelli teorici devono riuscire perciò a definire le regole di interazione fra individui al fine di riprodurre correttamente i risultati empirici.