
SATELLITI ARTIFICIALI
Satelliti artificiali
(V, iv, p. 647; v. satellite artificiale, App. III, ii, p. 670; IV, iii, p. 274)
Tecnologie del carico utile
In questi ultimi anni si è accentuata la tendenza, già manifestatasi dagli anni Ottanta, per la quale le apparecchiature necessarie a una data missione spaziale (carico utile, di norma chiamato payload) crescono in sofisticazione e in valore, sia assoluto sia relativo al totale della missione e, al contempo, vengono commercializzati e diffusi in misura crescente i prodotti e i servizi risultanti da tali missioni (v. anche spazio, esplorazione dello, in questa Appendice). Nel 1997 sono stati identificati oltre 1500 s. a., e si prevede che nei primi anni del 21° secolo questo numero supererà le 2000 unità con una spesa dell'ordine di dieci miliardi di dollari all'anno per costruzione, lancio e gestione dei satelliti.
Dal punto di vista applicativo, un payload appartiene a uno dei seguenti grandi settori (non vengono qui considerati i payload relativi alle missioni di carattere esclusivamente scientifico come quelle astronomiche e il telerilevamento di corpi celesti diversi dalla Terra): a) telecomunicazioni; b) telerilevamento ambientale (osservazione della Terra, remote sensing) e sorveglianza per scopi civili o militari; c) meteorologia; d) navigazione.
L'uso di piattaforme spaziali (s. a., stazioni orbitanti, navetta spaziale Shuttle) consente un ampio campo di vista con superamento dei limiti dovuti all'orizzonte e all'orografia e, rispetto alle piattaforme avioniche (aeromobili pilotati, ad ala fissa o rotante e aerei telecomandati), pure utilizzate nel telerilevamento e nella sorveglianza, fornisce a parità di tempo l'accesso a un'area di almeno tre ordini di grandezza più estesa.
Ciò è dovuto alla maggiore quota delle piattaforme spaziali: da 200 a 400 km per lo Shuttle, da 300 o 400 km in su per i satelliti (sotto tali quote il drag atmosferico altera in maniera spesso non accettabile l'orbita di un satellite, specie di massa medio-piccola), con valori tipici da 600 a 900 km per i satelliti in orbita eliosincrona, molto usata nel telerilevamento in quanto risulta in grado di mantenere costante l'angolo tra il piano orbitale e la direzione del Sole, assicurando le stesse condizioni di illuminazione per le osservazioni fatte alla stessa latitudine e nello stesso periodo dell'anno. Un aereo che voli a 150 m/s alla quota di 10 km può accedere in un giorno (8 ore di volo) a una superficie con area di circa 50.000 km², assumendo che il payload possa 'guardare' solo in un cono di 30° di semiapertura al nadir; un satellite in orbita bassa (800 km), il cui payload funzioni il 10% del tempo, può accedere, sotto la stessa ipotesi, a 50 milioni di km² al giorno (si noti che tale valore è poco meno di un decimo dell'area dell'intero globo terrestre). Un satellite geostazionario 'vede' da distanze assai più grandi (36.000 km nel punto più vicino, 42.000 km al limite della copertura, assunta per un angolo di elevazione minimo di 5°) circa un terzo della superficie terrestre.
Nella seconda metà degli anni Novanta sono state proposte piattaforme con caratteristiche intermedie tra quelle avioniche e quelle spaziali e con il vantaggio, rispetto a queste ultime, di manutenibilità e di assenza dei costi di lancio: si tratta delle piattaforme stratosferiche quasi-stazionarie, o LTA (Lighter Than Air), versione moderna dei dirigibili. La loro quota è di 20÷22 km, il posizionamento è mantenuto nell'intorno di poche centinaia di metri rispetto alla posizione nominale, la capacità di carico è dell'ordine delle tonnellate e la potenza disponibile per la missione, grazie all'uso di celle solari e, nelle ore notturne, di batterie, è dell'ordine delle decine di kW. Il progetto statunitense denominato SkyStation prevede piattaforme LTA a circa 20 km di quota, con copertura di un'area circolare di circa 230 km di diametro: installando ben 250 di esse sul territorio USA, con radiocollegamenti nella gamma dei 47 GHz, si intende fornire servizi di telefonia cellulare e accesso veloce a Internet. In realtà tali piattaforme possono essere interessanti anche per telerilevamento/sorveglianza e navigazione/controllo del traffico.
Gli sviluppi tecnologici di cui le applicazioni spaziali hanno maggiormente beneficiato sono: gli amplificatori di potenza a tubo e a stato solido, i ricevitori a basso rumore, i circuiti numerici a elevata velocità e forte integrazione, i circuiti e programmi dedicati all'elaborazione numerica dei segnali, le antenne multifascio e a scansione elettronica, i riferimenti temporali (clock) altamente stabili, le celle solari a elevata efficienza.
Satelliti per telerilevamento
I parametri di interesse dei tre ambienti - terra, acqua e atmosfera - sono misurati a distanza da opportuni sensori i quali, corredati dei dispositivi ausiliari per la conversione dei parametri misurati in dati elettronici registrabili o trasmissibili a terra e per la loro correlazione con i dati della piattaforma, costituiscono gli strumenti della missione (v. telerilevamento, App. V).
I sensori per telerilevamento possono essere passivi, se sfruttano le capacità di emissione degli oggetti di interesse e l'illuminazione naturale, oppure attivi, se utilizzano le capacità di retrodiffusione (backscattering) della radiazione prodotta dal sensore stesso. I sensori attivi a microonde sono essenzialmente dei radar (v. App. V); rispetto ai sensori passivi, a fronte di una complessità e un costo maggiori, presentano il vantaggio, fondamentale nelle regioni con copertura nuvolosa continua o quasi (oltre che per scopi di sorveglianza), di poter operare di giorno o di notte e con ogni tempo e, mediante un'opportuna tecnica denominata SAR (Synthetic Aperture Radar), di consentire, grazie alla sintesi dell'apertura tramite elaborazione coerente del segnale, un'elevata risoluzione spaziale, indipendente dalla lunghezza d'onda e dalla quota.

Le radiazioni elettromagnetiche utilizzate dalla maggior parte dei sensori spaziali spaziano dalle microonde all'ultravioletto, con lunghezze d'onda che vanno dalle decine di centimetri alle centinaia di nanometri. Nella tab. 1 sono riassunti i principali tipi di strumento, le piattaforme normalmente usate e i parametri estratti (ovvero, le informazioni prodotte) nel telerilevamento spaziale della Terra.
Negli anni Novanta si è verificata una crescente disponibilità per usi civili di tecnologie e prodotti precedentemente sviluppati per scopi militari (immagini a elevatissima risoluzione). I satelliti militari (comunemente chiamati satelliti spia) per creazione di immagini e mappe sono stati lanciati fin dagli anni Settanta; i più noti sono quelli statunitensi dal significativo nome di Key Hole (buco della serratura), in orbita bassa o bassissima, i primi dei quali fotografavano il territorio (con risoluzione dell'ordine di due metri) ed espellevano le pellicole che venivano paracadutate a terra; successivamente la risoluzione è migliorata fino ai 10 cm stimati per i recenti, grossi satelliti Key Hole KH 12, dotati anche di visione notturna all'infrarosso e di trasmissione delle immagini via radio.
Parallelamente, si è registrata una crescente enfasi sia sugli aspetti scientifici sia sugli aspetti applicativi ed economico-commerciali del telerilevamento da satellite, rispetto ai quali è in atto uno sforzo per rendere 'quantitativo' il telerilevamento. L'obiettivo, in sintesi, consiste nel calibrare i sensori e ricavare dai parametri telerilevati (quali temperatura di brillanza, riflettanza spettrale, coefficiente di retrodiffusione ecc.) i parametri geofisici e biofisici, di interesse principale per l'utilizzatore, risolvendo complessi problemi inversi, avvalendosi in ciò di una sempre maggiore quantità di misure indipendenti, fornite dai moderni sensori multifrequenza e multipolarizzazione.
Per quanto riguarda gli aspetti scientifici, l'acquisita coscienza della possibilità di cambiamenti del clima su scala globale ha stimolato, tra le altre, le analisi dell'accumulo di anidride carbonica e di altri gas causanti l'effetto serra (con incremento della temperatura media); dello svuotamento di ozono nella stratosfera; della riduzione dei ghiacci polari e montani, e in generale degli indicatori di modifiche, attuali o prevedibili; della distribuzione spazio-temporale sul nostro pianeta di temperatura, umidità, precipitazioni e conseguentemente del livello dei mari, tipo e copertura della vegetazione ecc., con implicazioni socioeconomiche da leggere a catastrofiche. Per quanto riguarda gli aspetti commerciali, i parziali successi del telerilevamento quantitativo hanno dato luogo negli anni Novanta a sviluppi di notevole importanza, quale la missione commerciale canadese RADARSAT, il cui satellite è dotato di SAR e le cui immagini (disponibili per tutto il globo) sono elaborate, distribuite e commercializzate da una società, la Radarsat International (RSI) costituita appositamente nel 1989.
Missioni spaziali di osservazione della Terra mediante strumenti, talvolta provati in precedenti missioni su piattaforma aerea, sono state e sono organizzate da enti spaziali nazionali e internazionali o consorzi; un capostipite è stato il satellite statunitense SEASAT (1978), progettato per il telerilevamento degli oceani con sensori attivi a microonde. Satelliti in orbita eliosincrona dotati di strumenti ottici, capaci di fornire immagini ad alta risoluzione (dell'ordine della decina di metri) della superficie della Terra non coperta da nubi, furono lanciati negli anni Ottanta dalla National Oceanic and Atmospheric Administration (NOAA) statunitense in collaborazione con la NASA (si tratta dei LANDSAT: il LANDSAT-4 è del 1982, il LANDSAT-5 del 1984), e dal Centre national d'études spatiales (CNES) in collaborazione con Belgio e Svezia (si tratta dei satelliti chiamati SPOT, Satellite pour l'observation de la Terre).
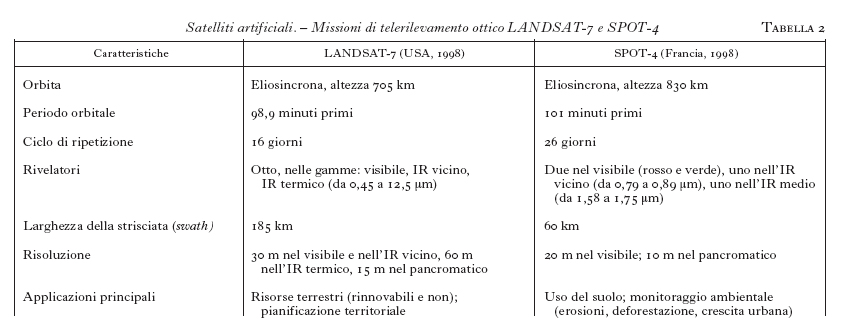
Lo SPOT-1 è stato lanciato nel 1986, seguito da SPOT-2 nel 1990 e da SPOT-3 nel 1993; quest'ultimo ha cessato di funzionare nel 1996 richiedendo un ulteriore lancio nel 1997. Lo SPOT-4 è stato lanciato nel marzo 1998. I satelliti SPOT sono collegati a ben venti stazioni terrene (Direct Receiving Stations) nei cinque continenti. Le caratteristiche dei quattro satelliti SPOT di prima generazione sono simili; è notevole la capacità di vista obliqua del sistema ottico, che consente di fornire un'immagine di un qualsiasi punto della Terra ogni tre giorni, malgrado il ciclo di ripetizione (cioè l'intervallo di tempo con il quale il satellite ritorna sulla verticale dello stesso punto sulla superficie della Terra) sia di 26 giorni. Il satellite SPOT di prossima generazione, lo SPOT-5, verrà lanciato nel 2002 e avrà una risoluzione di 3 m, contro i 10 m degli SPOT di prima generazione; inoltre, le sue prestazioni verranno migliorate mediante stereoscopia lungo la traccia. I prodotti SPOT sono commercializzati da apposite società e utilizzati per vari scopi, tra i quali: mappatura catastale rurale, pianificazione urbana, reti di trasporto terrestre e, in campo agricolo, valutazione e previsione dei raccolti; come ulteriore applicazione si cita la verifica delle dichiarazioni degli agricoltori, prodotte in numero di circa 3 milioni l'anno, ai fini dei contributi dell'Unione Europea nel quadro della politica agricola comune. Nella tab. 2 sono riportate le principali caratteristiche delle missioni LANDSAT-7 e SPOT-4.
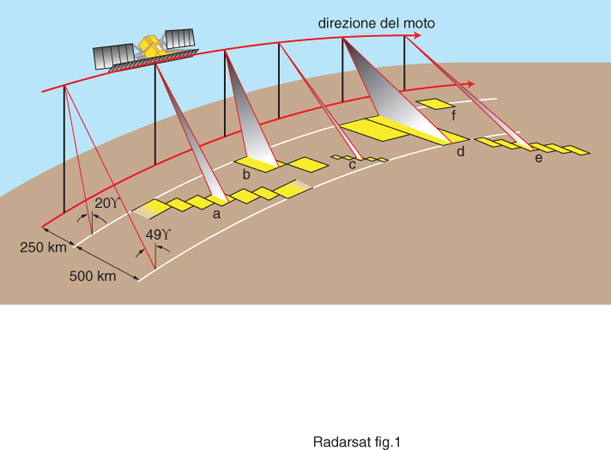
Le capacità di operare con ogni tempo e di misurare parametri complementari a quelli dei sensori ottici motiva l'utilizzazione di strumenti radar, e in particolare del SAR, in svariate applicazioni di telerilevamento. La tecnica SAR, le cui applicazioni avioniche con tecnologie analogiche risalgono agli anni Cinquanta, utilizza il moto della piattaforma per realizzare, tramite elaborazione del segnale, un'antenna 'virtuale' molto lunga (ordine di grandezza nelle applicazioni spaziali: alcuni chilometri alle lunghezze d'onda centimetriche, decine di chilometri alle lunghezze d'onda decimetriche) che consente di ottenere un'elevatissima risoluzione nella direzione del moto (di azimut o cross-range, v. fig. 1); il filtraggio di un'opportuna forma d'onda in trasmissione permette di ottenere una risoluzione dello stesso ordine nella direzione perpendicolare (di range); viene così ottenuta dallo spazio l'immagine di una strisciata (swath) la cui larghezza tipica va dalle decine al centinaio di chilometri, elevabile a qualche centinaia (degradando la risoluzione) mediante tecniche particolari, una delle quali è la SCANSAR (SCANning SAR, SAR a scansione nella direzione del range) utilizzata nel RADARSAT. La risoluzione di un SAR spaziale è tipicamente dell'ordine della decina di metri nelle applicazioni civili; essa non dipende dalla distanza né dalla lunghezza d'onda di funzionamento. L'indipendenza dall'illuminazione e dall'emissione naturale rende il SAR indispensabile per il telerilevamento con ogni tempo, in ogni ora della giornata e, nel caso dell'uso di lunghezze d'onda decimetriche (banda L, intorno a 22÷24 cm, o banda P, intorno a 62÷64 cm), consente la penetrazione del fogliame e anche del terreno arido, per es. desertico.
La prima applicazione del SAR su satellite risale alla missione del satellite oceanografico statunitense SEASAT. Lanciato in orbita bassa quasi polare a circa 800 km di altezza il 27 giugno 1978, esso sfortunatamente cessò di essere operativo a settembre dello stesso anno, e tuttavia nei suoi soli 100 giorni di funzionamento dimostrò le potenzialità del telerilevamento radar da satellite della superficie della Terra, specialmente marina e oceanica. Infatti era dotato di SAR (il SAR del SEASAT fu capostipite di una generazione di SAR operanti sui 23,5 cm di lunghezza d'onda, banda L, dotati di un'antenna di 10 m×2 m, che hanno volato sullo Shuttle negli anni Ottanta: si tratta del SIR-A, 1981, e del SIR-B, 1984) e di radar-altimetro; fornì per primo immagini di 100 km×100 km ad alta risoluzione spaziale (circa 25 m) e misure dell'altezza della superficie media del mare e del moto ondoso. Il SEASAT aveva anche un sensore ottico per fornire immagini per scopi meteorologici. Le attuali missioni europee di telerilevamento radar da satellite sono quelle di ERS-1 (Earth Observation Satellite), lanciato nel luglio del 1991 e di ERS-2, lanciato nell'aprile del 1995, entrambi da vettore Ariane-4.
In alcune importanti missioni spaziali il SAR è il sensore principale o l'unico. Le ricerche in corso sono rivolte a ottenere dai dati SAR: mappe dell'umidità del suolo per usi agricoli e per gestione delle risorse idriche; mappe dei tipi di vegetazione e monitoraggio del suo stato; valutazione di danni ambientali causati da inondazioni, terremoti, frane; rilievi topografici; rilievi di strutture geologiche associabili a risorse naturali (petrolio, gas naturale, minerali) e di attività vulcaniche; monitoraggio dei ghiacciai polari, degli iceberg, del traffico marittimo, delle perdite da petroliere (oil slicks); misura delle correnti superficiali oceaniche; infine, nelle applicazioni militari, riconoscimento di strutture e rivelazione e classificazione di bersagli fissi o mobili.

I più moderni sistemi SAR, capaci, grazie anche alla 'fusione' con altri dati, di raggiungere le prestazioni richieste dalle applicazioni sopra illustrate, possono utilizzare: a) tecniche multiparametriche, in particolare con più (per es. tre) frequenze di trasmissione e con diverse polarizzazioni (un SAR completamente polarimetrico trasmette in due polarizzazioni ortogonali, di norma orizzontale e verticale, e riceve nella polarizzazione trasmessa e in quella ortogonale); b) l'interferometria, che usa la differenza di fase degli echi dello stesso elemento di immagine (pixel) visto da direzioni diverse, ottenuti in due passaggi del satellite o, in future applicazioni, da due antenne diverse (interferometria single pass): da essa, opportunamente risolta l'ambiguità ('srotolamento' o unwrapping), si deduce la quota del pixel; per SAR con risoluzione orizzontale intorno a 30 m si può arrivare a precisioni di 10 m sull'altezza, con possibilità di creare modelli digitali di elevazione del terreno e dei ghiacciai. Un'importante applicazione dell'interferometria SAR single pass è avvenuta grazie alla missione SRTM (Shuttle Radar Topography Mission), compiuta nel gennaio del 2000: lo Space Shuttle portava, all'estremità di un braccio lungo circa 60 m, un'antenna ricevente che operava insieme al SIR-C (Shuttle Imaging Radar-C band). Obiettivo della missione è stato quello di costruire, in dieci giorni, una mappa di elevazione (con precisione assoluta di 16 m e relativa di 10 m, risoluzione orizzontale di 30 m) di tutta la Terra solida da 54° S a 60° N; c) antenne a schiera fasata (phased array) mono- o multicanale, per realizzare lo SCANSAR, aumentare la risoluzione in azimut col modo spotlight, correggere la localizzazione dei bersagli mobili e, dove richiesto, eliminare gli echi dei bersagli fissi ecc. Le caratteristiche principali delle missioni utilizzanti SAR sono riportate nella tab. 3.
Il satellite europeo per l'analisi delle risorse terrestri ERS-1 è stato posto in un'orbita eliosincrona inclinata di 98,5° a un'altezza di 785 km nel luglio 1991. La successiva missione del satellite ERS-2, lanciato nell'aprile 1995 per una durata prevista di oltre 4 anni, differisce da ERS-1 per i miglioramenti del radiometro a scansione ATSR-2, dotato rispetto all'ATSR (Along Track Scanning Radiometer) di ERS-1 di due bande in più nel visibile (0,55 μm e 0,66 μm) e nell'IR (0,86 μm e 1,6 μm), e per lo strumento GOME (Global Ozone Monitoring Experiment), di realizzazione italiana, che misura la concentrazione di ozono, di altri gas - ossigeno, ossidi di azoto ecc. - e di aerosol in una colonna di base 40×40÷40×320 km², con risoluzione verticale di 5 km per l'ozono, coprendo il globo in tre giorni.
ERS-1 utilizza l'AMI (Active Microwave Instrument), strumento radar polifunzionale in banda C, che opera come SAR nei modi image (SAR stripmap convenzionale) e wave (con creazione, a intervalli regolari, di immagini di circa 10×10 km² della superficie marina, dalle quali mediante analisi di Fourier bidimensionale si ricava lo spettro delle onde) e infine come wind scatterometer, il quale, su uno swath di 500 km, permette di ricavare velocità e direzione del vento poiché il coefficiente di retrodiffusione, σ°, della superficie marina dipende dalla rugosità, la quale a sua volta dipende dall'intensità e direzione del vento. Un radar altimetro operante nella banda Ku (a circa 13,8 GHz) puntato al nadir misura l'altezza di ERS-1 sulla sottostante superficie con precisione dell'ordine della decina di cm, permettendo di individuare i confini delle principali correnti oceaniche; esso inoltre attraverso la misura di σ° e della forma dell'eco consente di ricavare l'altezza significativa delle onde e l'intensità del vento. Infine, ERS-1 è dotato di un ATSR, radiometro IR a 4 canali (1,6 μm, 3,7 μm, 10,8 μm e 12 μm) per le misure della temperatura superficiale del mare con precisione radiometrica migliore di 0,1 K, su swath di 500 km e con pixel di 1×1 oppure 2×2 km².
Grazie allo specchio mobile che realizza la scansione dell'ATSR, la stessa area è vista due volte, al nadir e con inclinazione di 47°, il che permette la compensazione degli effetti atmosferici. Strumenti di supporto dell'ERS-1 sono: un microwave sounder a 23,8 e a 36,5 GHz per la misura del contenuto totale di vapore acqueo e di acqua liquida, allo scopo di correggere e calibrare i dati dell'altimetro, e un sistema a microonde (PRARE, Precision Range and Range-Rate Equipment) per la determinazione della posizione del satellite (traiettografia) con precisione decimetrica.
Un esempio notevole delle applicazioni dei satelliti ERS è la creazione di mappe topografiche di regioni coperte quasi sempre da nubi, come quelle tropicali: in particolare è in corso, a cura dell'Institut géographique nationale di Parigi, la creazione di una mappa 1:200.000 della Guiana Francese, con precisione assoluta di localizzazione migliore di 30 m senza punti di controllo a terra; un altro esempio è l'individuazione di possibili catastrofi ambientali come, per es., per il rilascio della macchia di petrolio scaricata, nell'agosto 1996, dalla petroliera Song San, con inquinamento delle coste di Singapore e dell'isola di Sentosa.
Un'altra notevole applicazione spaziale del SAR è quella costituita dal satellite RADARSAT della Canadian Space Agency, che il 4 novembre 1995 è stato posto in un'orbita eliosincrona inclinata di 98,6° a un'altezza nominale di 798 km, con periodo di 100,7 minuti (14 orbite al giorno) e periodo di ripetizione di 24 giorni; i principali scopi sono il monitoraggio ambientale, lo studio degli oceani, dei ghiacciai, della neve e del terreno.
Il SAR del RADARSAT opera alla lunghezza d'onda di 5,7 cm, larghezza di banda a radiofrequenza di 11,6, 17,3 o 30 MHz, polarizzazione HH, durata d'impulso di 42 μs, frequenza di ripetizione degli impulsi da 1270 a 1390 Hz, potenza di picco 5 kW e potenza media nominale 300 W; è di notevole interesse l'antenna, di dimensioni 15 m×1,5 m, del tipo a schiera fasata (phased array) che consente, mediante scansione elettronica del fascio nelle direzione di range (cioè nel piano normale alla velocità del satellite), di realizzare ben 7 modi di funzionamento, con angoli di incidenza variabili da 20° a 49° (l'intervallo si amplia da 10° a 59° nei modi extended, consentendo di acquisire immagini di aree che distano fino a ben 1175 km dalla traccia a terra del satellite; immagini a risoluzione normale, 25 m, possono essere acquisite con periodi compresi tra 0,5 e 1 giorno per latitudini maggiori o eguali a 70°, e con periodi da 1 a 5 giorni per le altre latitudini), risoluzione da 8 a 100 m e larghezza di swath da 50 km a 500 km. La variazione dell'angolo di incidenza è particolarmente utile nella creazione di mappe topografiche e di modelli digitali del terreno (DTM, Digital Terrain Models) mediante stereoscopia e interferometria. La massa del satellite è di 2750 kg al lancio, la potenza dei pannelli solari di 3,5 kW e le 3 batterie sono da 48 Ah ciascuna. La vita di progetto è di 5 anni, pertanto il RADARSAT attuale, denominato anche RADARSAT-1, dovrà essere sostituito dalla già pianificata missione RADARSAT-2 (prevista negli anni 2001-2005); è allo studio il futuro RADARSAT-3 con capacità multifrequenza e multipolarizzazione.
Nella fig. 3 è mostrata un'immagine RADARSAT a media risoluzione (25 m) della costa peruviana presso Lima, punto di incontro delle correnti di Humboldt e di El Niño. Le aree a elevato coefficiente di retrodiffusione (più chiare nell'immagine) sono indicative di moto ondoso e, nella porzione in basso a sinistra, hanno la caratteristica struttura a X dovuta all'incrocio delle correnti e alle maree. Analogamente, le onde generate dal vento sono evidenti vicino all'isola di San Lorenzo, come pure le imbarcazioni nella zona di Callao, porto di Lima, e la stessa città, caratterizzate dai toni molto chiari tipici dei manufatti (edifici e imbarcazioni hanno infatti un coefficiente di retrodiffusione radar ben superiore alle superfici naturali).
Nella fig. 4 è mostrata un'immagine RADARSAT ad alta risoluzione di un'area di 66 km×40 km a ovest di Roma, acquisita il 29 dicembre 1995 con un angolo di incidenza di 40,7°. Le aree più scure, oltre al Mar Tirreno (sul quale sono visibili tre imbarcazioni), sono i laghi, che riflettono le microonde in direzione diversa da quella del radar (sono visibili quelli di Bracciano, il più grande, di Martignano, a fianco, e di Vico, in alto a sinistra ). Il Tevere è visibile, a partire dall'angolo in alto a destra, fino alla foce, con l'abitato di Fiumicino e, immediatamente a nord di esso, le tre piste dell'aeroporto 'Leonardo da Vinci', più scure della campagna, e l'aerostazione, più chiara, immediatamente a sud della quale spicca la forma esagonale del Lago di Traiano; nell'abitato di Roma si individuano alcuni grandi edifici isolati tra i quali, a nord-ovest, lo Stadio Olimpico.
Le diverse caratteristiche delle immagini radar e ottiche sono evidenti confrontando le immagini precedenti con la fig. 5, che è un'immagine dell'Italia del Nord, della Slovenia e di parti di Austria e Croazia, rilevata il 22 luglio 1995 dal satellite russo RESURS-01, lanciato a novembre 1994 su un'orbita eliosincrona a 678 km di altezza e 98° di inclinazione, e dotato del radiometro multispettrale MSU-SK operante in due bande nel visibile e due bande nel vicino infrarosso, con risoluzione di 160 m, e in una banda nell'infrarosso termico, con risoluzione di 600 m. Notevole è l'ampiezza dello swath, di ben 600 km, con possibilità di fornire immagini di 600×600 km², comparabili all'estensione di una nazione europea. Nell'immagine si nota una limitata copertura nuvolosa sulle Alpi e foschia in pianura padana.
Le future attività europee per l'osservazione della Terra sono centrate sul programma ENVISAT-1 dell'European Space Agency (ESA), che ha come obiettivi primari la continuità delle osservazioni iniziate con i satelliti ERS, migliorandole specie per quanto riguarda oceani e ghiacciai, e ampliando i parametri acquisiti allo scopo di migliorare la conoscenza dei fattori che determinano l'ambiente e i cambiamenti climatici (aspetti ben noti sono il buco dello strato di ozono e l'effetto serra) e di migliorare la gestione delle risorse terrestri.
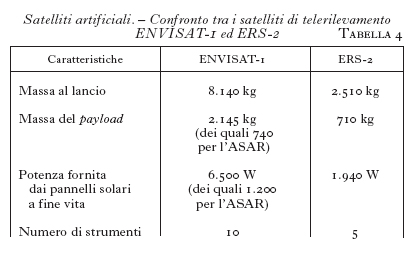
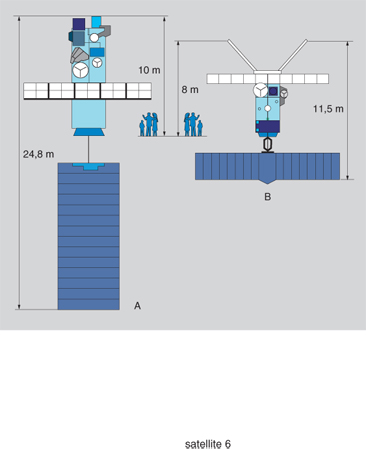
Per realizzare tali obiettivi, l'ESA ha pianificato per il 2001 il lancio del più grande satellite europeo, ENVISAT-1, costituito dalla piattaforma polare e dal modulo payload; quest'ultimo comprende ben 10 strumenti tra i quali un SAR di tipo avanzato, l'ASAR (Advanced SAR), funzionante in banda C, con antenna attiva, doppia polarizzazione, capacità SCANSAR; il confronto tra ENVISAT-1 ed ERS-2 è mostrato in tab. 4 e in fig. 6. Il satellite ENVISAT verrà lanciato da Ariane-5 su orbita eliosincrona, altezza 780÷820 km, periodo 100,6 minuti, ciclo di ripetizione 35 giorni (la maggior parte dei sensori coprirà l'intero globo in 1÷3 giorni).

Degli strumenti di ENVISAT (4 a microonde/radiofrequenza e 6 ottici, dall'ultravioletto all'infrarosso) due, e precisamente il radar-altimetro a doppia frequenza (13,575 e 3,2 GHz) RA-2 e il radiometro a microonde a doppio canale (23,8 e 36,5 GHz) MWR, necessario per la correzione dei dati di RA-2, sono di progettazione italiana. Notevole è il SAR di tipo ASAR operante in banda C (5,331 GHz) con doppia polarizzazione (HH e VV) alternata, antenna del tipo active phased array costituita da 320 moduli ricetrasmittenti da 10 W ciascuno con scansione elettronica e conseguente capacità wide swath (con larghezza dello swath da 100 km fino a 400 km nel modo scansar). Nella fig. 7 è mostrato il satellite ENVISAT-1 in configurazione operativa.
Le missioni di telerilevamento da satellite dei primi anni del 21° secolo saranno basate su alcuni progetti in fase avanzata di sviluppo, tra i quali il sistema Light SAR di NASA/JPL, concepito per missioni satellitari di 3÷5 anni, e il sistema italiano Cosmo-Skymed, costituito da una costellazione di 7 satelliti con sensori ottici e SAR; il lancio del primo di essi, dotato di SAR in banda X ad alta risoluzione spaziale, è previsto a inizio 2003 e il completamento del sistema a fine 2004.
Satelliti per meteorologia
Le osservazioni dallo spazio mediante i satelliti meteorologici, integrate con rilevamenti terrestri di opportuni sensori radar (radar meteorologici e radar per la misura dei venti in quota, chiamati wind profilers) e con misure dei parametri atmosferici (temperatura, pressione, umidità, velocità del vento) mediante reti di stazioni fisse e, per i parametri in quota, mediante lanci periodici di radiosonde, sono un elemento chiave per le analisi e per le previsioni meteorologiche, in particolare su scala sinottica.
Con un numero limitato (almeno tre) di satelliti meteorologici geostazionari a opportune longitudini si rilevano sull'intero globo, escluse le zone polari: a) immagini della superficie terrestre e della copertura delle nubi nel visibile e nell'infrarosso; b) informazioni circa il movimento delle nubi e il campo del vento; c) temperatura della superficie marina; d) spessore e altezza delle nubi. Tali satelliti permettono inoltre la diffusione di immagini e dati alle 'stazioni degli utenti' nonché la memorizzazione e la trasmissione di dati provenienti da piattaforme fisse o mobili, posizionate sia sulla superficie terrestre sia nell'atmosfera.
I satelliti meteorologici polari, sviluppati dagli Statunitensi e dai Russi e più costosi dei geostazionari, orbitano a quote tipiche tra 800 e 1000 km, dalle quali i loro sensori possono acquisire dati ad alta risoluzione spaziale e spettrale. Essi sono usati per ottenere tre tipi principali di osservazioni: la copertura delle nubi; la misura accurata della temperatura della superficie terrestre e marina; la misura delle variazioni di temperatura e di contenuto di vapore acqueo nell'atmosfera.
All'inizio degli anni Sessanta i meteorologi capirono l'importanza di utilizzare dati acquisiti dallo spazio (v. satellite artificiale, App. IV); il 1°aprile 1960 fu lanciato in orbita polare il primo satellite meteorologico statunitense denominato TIROS, dotato di una semplice telecamera con sensore vidicon. Nel 1974 fu lanciato il primo satellite meteorologico geostazionario statunitense (GOES, Geostationary Operational Environmental Satellite), seguito nel 1977 dal lancio del satellite giapponese GMS (Geostationary Meteorological Satellite) o Himawari. In ambito europeo la prima proposta di un satellite geostazionario fu fatta dal CNES nel 1969. Nel 1971 il CNES propose il progetto METEOSAT con l'intento di coinvolgere più Stati europei. Questa proposta fu accettata nel 1972 e otto Stati membri decisero di finanziare il Pre-Operational-Programme.
Il 23 novembre 1977 fu lanciato il satellite meteorologico geostazionario METEOSAT-1; la prima immagine METEOSAT è del 9 dicembre 1977. Dal punto di vista tecnico, è notevole l'antenna del tipo ad array cilindrico, sviluppata in Italia, con scansione elettronica (EDA, Electronically Despun Array) per compensare la rivoluzione del satellite sul proprio asse (spin ), costituita da gruppi di 4 dipoli lungo le generatrici del cilindro. Il 19 giugno 1981 venne lanciato dalla stazione di Kourou, nella Guiana francese, il METEOSAT-2. Fu subito chiaro che il programma METEOSAT, come sistema di monitoraggio meteorologico, offriva un campo di applicazioni assai più ampio di quello inizialmente previsto. Così molti paesi europei furono incoraggiati a incrementare i loro contributi e, nel marzo del 1983, riuniti in una conferenza inter-governativa, decisero di affidare all'ESA il programma operativo di sviluppo (MOP, Meteorological Operational Programme). Furono inoltre definite le specifiche della European Organization for the Exploitation of Meteorological Satellites (EUMETSAT) costituita nel 1986 con quartier generale a Darmstadt, e dal 1987 responsabile del lancio, della fase operativa e della diffusione dei dati dei satelliti METEOSAT.
Il 15 giugno 1988 fu messo in orbita il METEOSAT-3, che sostituì il METEOSAT-2 e fu a sua volta sostituito nel maggio 1989 dal satellite MOP-1 (METEOSAT-4), primo satellite del programma MOP. METEOSAT-3 rimase in orbita come sistema di riserva (back-up) fino al lancio di MOP-2 (METEOSAT-5) avvenuto il 2 marzo 1991. Il MOP-3 (METEOSAT-6) venne lanciato il 20 novembre 1993. L'ultimo satellite della serie MOP è il METEOSAT-7, lanciato nel 1997, con funzionamento pianificato almeno fino al 2003. Attualmente il METEOSAT-4 è impiegato dagli Stati Uniti tramite una convenzione tra EUMETSAT e NOAA, mentre il METEOSAT-5 è utilizzato in Europa e il METEOSAT-6, normalmente in stand-by, sostituisce il METEOSAT-5 in caso di avaria. Negli anni Novanta sono stati lanciati i satelliti geostazionari INSAT per usi interni dell'India. Nel 1994 la rete satellitare è stata arricchita con la messa in orbita del satellite russo geostazionario GOMS.
Attualmente le osservazioni meteorologiche su scala globale sono effettuate mediante una rete di 5 satelliti geostazionari, con cui si copre l'intero globo da −70° a +70° circa di latitudine. Essi sono denominati: GOES-W (Geostationary Operational Environmental Satellite West, Stati Uniti occidentali), GOES-E (Geostationary Operational Environmental Satellite Est, Stati Uniti orientali), METEOSAT (METEOrological SATellite, Europa), GOMS (Geostationary Operational Meteorological Satellite, Russia), GMS (Geostationary Meteorological Satellite, Giappone). Tale rete è integrata dai satelliti polari, in particolare da un satellite statunitense della serie NOAA e dal satellite russo METEOR.
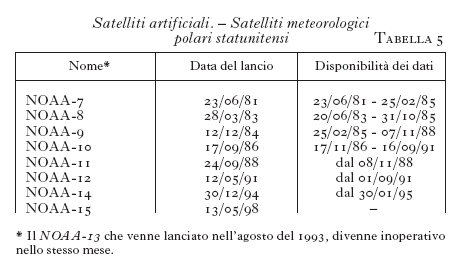
I satelliti meteorologici polari statunitensi messi in orbita eliosincrona a 820÷850 km di quota a partire dagli anni Ottanta, elencati in tab. 5, sono dotati di radiometri e scandagli atmosferici.
I satelliti NOAA operativi a inizio 1999 sono: NOAA-10, -12, -14, -15. In particolare il NOAA-12 è dotato di:
a) radiometro d'immagine ad altissima risoluzione AVHRR (Advanced Very High Resolution Radiometer) con un canale nel visibile, uno nell'infrarosso vicino (0,72÷1,0 μm), uno nell'infrarosso medio (3,55÷3,93 μm) e due canali nell'infrarosso termico (10,5÷11,5/12,5 μm). La risoluzione nominale a terra è di circa 1 km. Da tale strumento provengono i dati HRPT (High Resolution Primary Transmission) nella rete meteorologica mondiale;
b) sistema TOVS (TIROS Operational Vertical Sounder) costituito da tre strumenti: HIRS-2 (High-resolution IR Sounder), scandaglio atmosferico con 20 canali (19 nell'infrarosso e 1 nel visibile) per rilevare i profili di temperatura dalla superficie fino a circa 40km di quota; MSU (Microwave Sounding Unit), scandaglio atmosferico a 4 canali a microonde per rilevare i profili di temperatura in presenza di nubi dalla superficie fino a circa 20 km di quota; SSU (Stratospheric Sounding Unit), scandaglio stratosferico con 3 canali nell'infrarosso termico.
I satelliti geostazionari statunitensi messi in orbita negli anni Ottanta sono GOES-4, -5, -6, -7. La strumentazione principale a bordo di questi satelliti è costituita dal VISSR (Visible and Infrared Spin Scan Radiometer), radiometro ottico che fornisce una risoluzione di 1 km nel visibile e di 8 km nell'infrarosso.
I satelliti geostazionari europei, la cui responsabilità dal 1987 è dell'organizzazione intergovernativa EUMETSAT che comprende 17 Stati europei, sono i METEOSAT (3÷4 anni di vita) il cui scopo è quello di: a) ottenere, mediante un radiometro d'immagine, immagini della Terra e della copertura nuvolosa nel visibile e nell'infrarosso (sono forniti tre tipi d'immagine: visibile; vapor acqueo, da 5,7 a 7,1 μm; IR, da 10,5 a 12,5 μm, con risoluzione di 2,5 km nel visibile e di 5 km nelle gamme del vapor acqueo e dell'IR), con copertura del disco terrestre - da orizzonte a orizzonte - in 30 minuti primi; b) distribuire in ricezione diretta (un'immagine ogni 30 minuti) i dati del radiometro d'immagine ad alta risoluzione (formato HRID, High Resolution Image Dissemination) destinato alle PDUS (Primary Data User Stations); c) raccogliere e distribuire dati meteo rilevati da stazioni automatiche a terra (stazioni meteorologiche terrene, boe, aeromobili, palloni); d) distribuire dati meteo e immagini elaborate: i dati trasmessi in formato analogico denominato WEFAX (WEather FAXimile) sono destinati alle SDUS (Secondary Data User Stations) e contengono immagini e dati meteorologici; vengono pure trasmessi dati meteorologici convenzionali (MDD, Meteorological Data Distribution).
Per gli anni 2000 sono previsti due programmi di sviluppo nell'ambito dei satelliti meteorologici. Il primo, denominato MSG (METEOSAT Second Generation), sostituirà l'attuale MOP (METEOSAT Operation Programm). Il programma MSG prevede di lanciare nello spazio fra gli anni 2000 e 2007 tre satelliti geostazionari di nuova generazione con massa di circa 2000 kg contro i circa 720 kg dei satelliti MOP e con l'impiego di un nuovo radiometro d'immagine a 11 canali, il SEVIRI (Spinning Enhanced Visible and Infrared Imager), con prestazioni migliorate in termini di risoluzione spazio-temporale (1 km con immagini ogni 15 minuti in 12 canali spettrali). L'Italia ha già ratificato questo programma.
Il secondo progetto di sviluppo riguarda i satelliti in orbita polare, per il quale EUMETSAT sta preparando la componente europea di un sistema congiunto Europa-USA; in base all'accordo denominato Initial Joint Polar System (IJPS), la componente europea (EUMETSAT) avrà la responsabilità della copertura mattutina e quella statunitense (NOAA) della copertura pomeridiana. Il satellite METOP-1 della EUTELSAT (lancio previsto: aprile 2003, seguito dal METOP-2 nel 2006 e dal METOP-3 nel 2010) è sviluppato in questo quadro congiunto. In Italia il programma è seguito dal Servizio meteorologico dell'aeronautica militare in coordinamento con l'ASI (Agenzia Spaziale Italiana), in Europa da EUMETSAT ed ESA e negli Stati Uniti da NOAA, NASA e il Department of Defence (DOP). I due programmi di sviluppo costituiranno la base informativa principale della meteorologia operativa degli anni 2000.
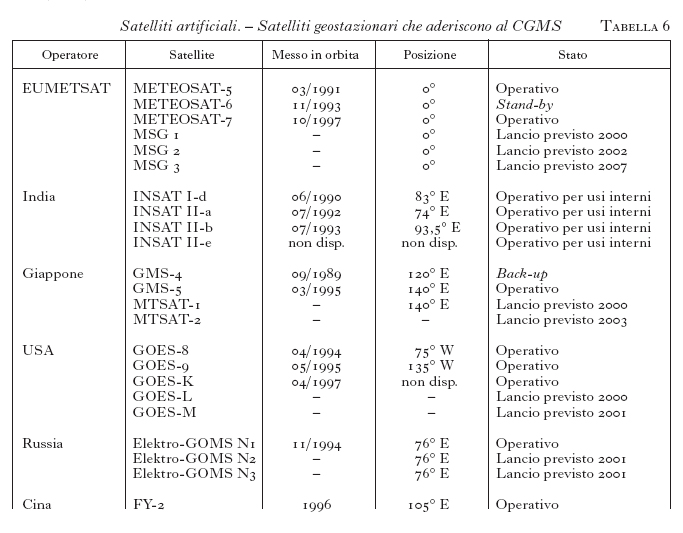
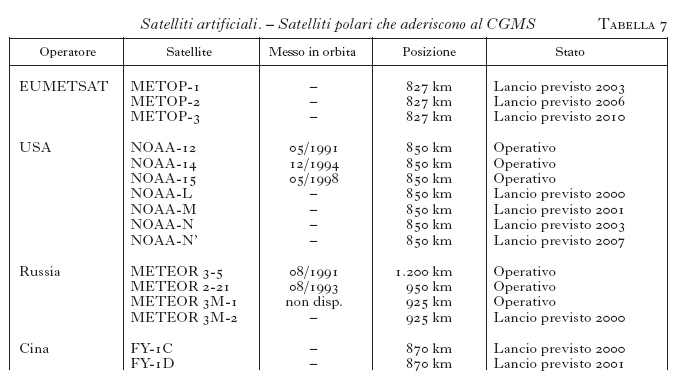
In tab. 6 e tab. 7 sono mostrati, per i satelliti geostazionari e polari, gli operatori che aderiscono al CGMS (Co-ordination Group for Meteorological Satellites), il nome del satellite, la posizione del satellite e lo stato attuale (se il satellite non è in orbita è indicata la data in cui è previsto il lancio).
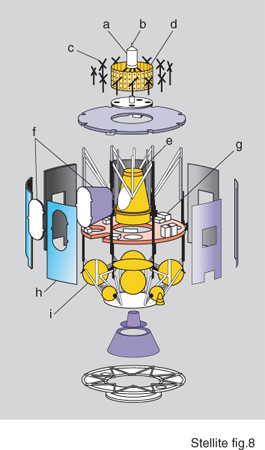
Nella fig. 8 è mostrata la vista esplosa del satellite meteorologico MSG, di tipo spinned come i METEOSAT, il cui corpo principale è costituito da un cilindro di 3,4 m di diametro e 2,4 m di altezza. Il satellite è costruito in modo modulare; le componenti principali sono: nella parte centrale il radiometro multispettrale SEVIRI, a 11 canali da 0,56 a 14,76 μm; nella parte superiore il sistema MCP (Mission Communication Payload) con transponder e antenne.
Esistono inoltre satelliti meteorologici per scopi militari; in particolare la United States Air Forces (USAF) gestisce i satelliti del Defense Meteorological Satellite Program, in orbite polari a circa 800 km, capaci di produrre immagini meteo con risoluzione di circa 300 m.
I satelliti meteorologici finora trattati hanno sensori passivi; un sensore attivo, e precisamente un radar meteorologico, è lo strumento della Tropical Rainfall Mapping Mission (TRMM), promossa dalle agenzie spaziali statunitensi (NASA) e giapponese (NASDA) allo scopo di determinare, su scala globale, la distribuzione del calore latente atmosferico e delle precipitazioni: il tasso di convezione è una grandezza necessaria ai modelli globali di circolazione atmosferica, indispensabili per migliorare la comprensione dei cambiamenti del clima del pianeta. Il satellite TRMM, il cui lancio è stato effettuato nel novembre 1997, imbarca il Precipitation Radar (PR), radar meteorologico operante nella banda dei 13,8 GHz con risoluzione di 250 m in distanza e di 4,3 km, al nadir, sul piano orizzontale.
Il fascio dell'antenna del PR viene scandito su 49 posizioni perpendicolarmente al moto del satellite, generando ogni 0,6 s uno swath di 220 km contro i circa 700 km degli altri sensori (un radiometro d'immagine a microonde, TMI; un radiometro a larga banda nel visibile e nell'IR termico, CERES; uno scanner nel visibile e nell'IR medio e termico, VIRS; un sensore di fulmini nell'IR vicino, LIS). Notevole la tecnologia dell'antenna ad active phased array, completamente allo stato solido. La sensibilità del radar è tale da fornire un rapporto segnale/disturbo unitario (su singolo impulso) per un tasso di pioggia di 0,5 mm/h, e da misurare, alla sommità della pioggia, la precipitazione con un'accuratezza teorica di 0,7 mm/h. L'orbita del TRMM è bassa (350 km), e inclinata di 35°.
Satelliti per navigazione. - I grandi sviluppi degli ultimi anni, con particolare riferimento al traffico civile (marittimo, aereo e, ancora più recentemente, stradale), sono basati su tecnologie di origine militare.
Storicamente il primo esperimento di localizzazione tramite segnali emessi da un s. a. fu quello della ricostruzione della traiettoria dello Sputnik 1 nel 1957: conoscendo le caratteristiche dinamiche dell'orbita e analizzando lo scorrimento in frequenza del segnale radio dello Sputnik dovuto all'effetto Doppler conseguente al suo moto orbitale (brevemente, lo shift Doppler), alcuni ricercatori occidentali riuscirono a ricostruire l'orbita del satellite. Da tali risultati, oltre ai successivi sviluppi della traiettografia di precisione, indispensabile per l'uso di alcuni dati di satelliti di telerilevamento, nacque l'idea di invertire il procedimento: nota l'orbita del satellite che emette i segnali, si può determinare la posizione del ricevitore attraverso misure di shift Doppler. Fu così realizzato dalla marina USA il sistema di navigazione TRANSIT, operativo dal 1964 al 1996, basato su un piccolo (da 4 a 6) numero di satelliti in orbita circolare polare alla quota di 1075 km con periodo orbitale di 107 minuti.
Ricevendo i segnali emessi da un satellite TRANSIT alle due frequenze di 150 MHz e 400 MHz, e contenenti le effemeridi del satellite, l'utente misura lo shift Doppler e determina, con un tempo di osservazione di alcuni minuti, la propria latitudine e longitudine con errori dell'ordine del centinaio di metri; se l'utente è animato da una velocità incognita, nasce un errore di circa 750 m per ogni m/s di velocità. L'uso delle due frequenze è necessario per compensare il ritardo di propagazione ionosferico, inversamente proporzionale al quadrato della frequenza: fatta la compensazione, un utente fermo può ottenere una precisione orizzontale dell'ordine di una ventina di metri in 10÷15 minuti primi. Il sistema è globale, ma una determinazione di posizione può essere fatta solo ogni ora e mezza circa, dato il limitato numero di satelliti; il TRANSIT non è adatto a mezzi aerei a causa della loro quota e della loro velocità. Nello stesso periodo l'aeronautica statunitense (USAF) studiò un sistema di navigazione satellitare tridimensionale detto TIMATION 621B, basato sulla diffusione diretta di segnali per misura della distanza (ranging) e non sull'effetto Doppler, con lancio, negli anni 1964-72, di una serie di satelliti sperimentali forniti di orologi altamente precisi, inizialmente al quarzo e poi atomici.
Nel 1973 fu presa la decisione di sviluppare per le tre forze armate USA un sistema unico di navigazione basato sul ranging, affidato all'USAF, denominato NAVSTAR e poi GPS (Global Positioning System); esso fu reso possibile dall'elevata precisione degli orologi atomici e dall'uso di tecniche a dispersione di spettro con modulazione del messaggio di navigazione mediante sequenze binarie pseudocasuali.
Il primo satellite GPS sperimentale fu lanciato nel febbraio 1978, e il primo satellite GPS operativo fu lanciato ben 11 anni dopo; una serie di lanci da febbraio 1989 a giugno 1993 portarono la costellazione al numero stabilito di satelliti (24), con dichiarazione, nel corso del 1993, della capacità iniziale di funzionamento (Initial Operation Capability). La piena aderenza del sistema GPS e delle sue prestazioni a una serie di requisiti formalizzati, detta Full Operational Capability, è stata dichiarata il 17 luglio 1995 dalla USAF, a valle delle prove del sistema nella sua configurazione con i 24 satelliti del Blocco ii; il GPS è gestito dal 50° Space Wing della USAF, Falcon Air Force Base, Colorado.
Il sistema GLONASS (GLObal NAvigation Satellite System), sviluppato dall'Unione Sovietica nei primi anni Ottanta per motivi e scopi analoghi al NAVSTAR-GPS, è stato dichiarato pienamente operativo a gennaio 1996, circa 13 anni dopo il lancio del primo satellite; è attualmente gestito dalle forze armate della Federazione Russa. L'assenza di lanci nel periodo 1996-98 ha ridotto la costellazione a soli 14 satelliti operativi, ma il lancio di tre satelliti GLONASS il 30 dicembre 1998, la pianificazione di un successivo lancio e il progetto di satelliti a vita media più lunga dimostrano l'interesse che la Federazione Russa, pur nelle ristrettezze economiche, rivolge alla navigazione satellitare. Il funzionamento del GLONASS è assai simile a quello del GPS; se ne differenzia per il fatto che i satelliti della costellazione trasmettono in diversità di frequenza in luogo della diversità di codice del GPS; pertanto un ricevitore GLONASS tende a essere più costoso di un equivalente ricevitore GPS a fronte di una maggiore semplicità del segmento spaziale.
La navigazione satellitare intermodale ha ricevuto un enorme impulso in tutto il mondo negli anni Novanta, in particolare dopo il 1995, con il completamento delle costellazioni satellitari dei sistemi globali di navigazione GPS e GLONASS. Entrambi i sistemi operano mediante la misura dell'intervallo di tempo che intercorre tra l'emissione di un segnale codificato da parte dei satelliti, contenente la loro posizione, e la sua ricezione da parte dell'utente dotato di un apposito ricevitore. Dato che il messaggio emesso da ciascun satellite contiene il tempo di emissione, il ricevitore può calcolare la differenza tra l'istante di ricezione e quello di emissione e pertanto, nota la velocità di propagazione, determinare la distanza dei satelliti in visibilità. Il riferimento temporale della costellazione GPS è mantenuto unico tramite l'uso di orologi atomici e la periodica sincronizzazione da terra; la necessità di mantenere riferimenti temporali altrettanto precisi per gli utenti è eliminata introducendo, oltre alle tre coordinate spaziali, il tempo come quarta incognita: il GPS è quindi un sistema di navigazione e di temporizzazione precisa.
Gli orologi atomici a bordo dei satelliti GPS sono 2 al rubidio e 2 al cesio. Quelli al cesio sono 1,5 volte più costosi di quelli al rubidio e hanno una migliore stabilità a lungo termine (10⁻¹⁴ in un giorno, contro 10⁻¹³ del rubidio), necessaria per il codice di precisione riservato agli utenti autorizzati dal Ministero della Difesa degli Stati Uniti.

Con almeno quattro misure di ritardo temporale (che moltiplicate per la velocità delle onde radio forniscono i cosiddetti pseudo-range, dove il prefisso pseudo evidenzia la differenza rispetto alle vere misure di distanza che si avrebbero in condizioni ideali con un unico riferimento temporale) da satelliti differenti, il ricevitore dispone dei dati necessari per risolvere un sistema di equazioni nelle quattro incognite costituite dalle tre coordinate spaziali e dal tempo. Con cinque satelliti in vista (cosa che, con la costellazione completa dei 24 satelliti - nessuno guasto - avviene, in assenza di ostacoli e con elevazione dei satelliti di almeno 5° sull'orizzonte, su tutto il globo e per tutto il tempo) il ricevitore può individuare un'anomalia dovuta al malfunzionamento di uno dei satelliti; e con sei satelliti in vista (cosa che, nelle stesse condizioni, avviene nel 99,5% dei casi) si può individuare il satellite guasto ed escludere i suoi segnali dalla soluzione del sistema di equazioni di navigazione. Una tale ridondanza del numero di satelliti visibili rispetto al minimo teorico di 4 è in realtà necessaria quando si considera la possibilità di mancato funzionamento di uno o più satelliti (per guasti a lungo termine, a breve termine, e per manovre), e l'effetto della posizione relativa satelliti-ricevitore, che comporta una degradazione, o diluizione della precisione, tanto maggiore quanto più vicine sono tra loro le direzioni dei satelliti viste dal ricevitore, con la necessità di utilizzare la migliore quaterna tra i numerosi satelliti visibili (almeno 9 nel 90% dei casi ). La costellazione GPS è mostrata in fig. 9.
Nel sistema GPS ogni satellite emette sulla frequenza L1=1575,42 MHz (ovvero 154 volte la frequenza base di 10,23 MHz) un proprio codice pseudocasuale Gold di 1023 cifre binarie (chips) ripetute con un periodo di 1 ms, accessibile a tutti gli utenti (codice C/A, Coarse-Acquisition), e sulla frequenza L2 = 1227,60 MHz (120 volte la frequenza base di 10,23 MHz) un proprio codice di precisione (codice P, con periodo di 38 settimane) che permette una migliore precisione ed è riservato ai soli utenti autorizzati dal Department of Defence degli Stati Uniti. Il codice P è trasmesso (in quadratura rispetto al codice C/A) anche su L1: la trasmissione su due frequenze consente al ricevitore la compensazione del ritardo ionosferico nella propagazione del segnale dal satellite all'utente.
Il guadagno di elaborazione ottenuto dal ricevitore mediante la correlazione con il codice permette di operare con segnali molto deboli: il livello del segnale GPS ricevuto con antenna isotropica sulla superficie terrestre è di soli −160 dBW per il codice C/A e più basso per il codice P, precisamente −163 dBW su L1 e −166 dBW su L2; è quindi assai importante proteggere le frequenze L1 ed L2 da interferenze, volute o no, che possono rendere inutilizzabile il sistema in un raggio di decine di km, come in effetti è avvenuto.
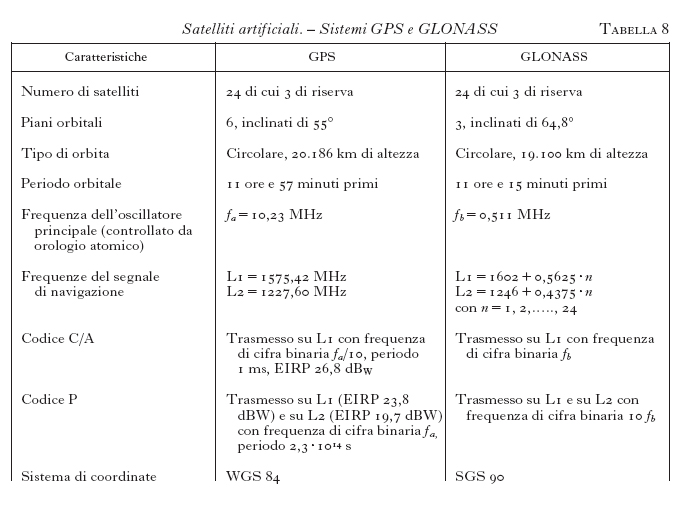
L'utente deve essere dotato di un'antenna e di un ricevitore GPS con tanti canali quanti sono i satelliti usati contemporaneamente (da 1, nel caso di utenti fermi o quasi, a 5 e fino a un massimo di 12 nel caso di utenti aerei) e determinare, per ogni satellite: il tempo di trasmissione del satellite; la posizione del satellite; le condizioni di funzionamento; correzione del clock; correzione del ritardo di propagazione. Tali informazioni sono contenute nel messaggio di navigazione, con frequenza di 50 bit/s, modulato (tramite somma modulo-2) con il codice pseudocasuale di entrambi i canali C/A e P. Il messaggio è composto da 25 trame, comprendendo ogni trama 5 sottotrame di 300 bit ciascuna; la trasmissione di una trama richiede 30 s. In tab. 8 sono riportate la principali caratteristiche dei sistemi GPS e GLONASS.
Il GPS, a differenza del GLONASS, è soggetto a una deliberata degradazione della qualità dei segnali emessi, in modo che l'utente non autorizzato dal Ministero della Difesa può determinare la propria posizione con una precisione di 100 m nel piano orizzontale e 150 m in quota nel 95% dei casi; senza tale degradazione e col solo codice C/A l'errore orizzontale è inferiore a 30 m e quello verticale a 50 m, sempre nel 95% dei casi (l'errore di localizzazione GPS ha una distribuzione gaussiana fino ad almeno 6 volte la deviazione standard; i valori di errore standard sono la metà di quelli al 95%).
Il Precision Positioning Service (PPS), riservato agli utenti dal Ministero della Difesa degli Stati Uniti, grazie all'uso del codice P e alla correzione del ritardo ionosferico (v. sopra), permette una precisione orizzontale di 21 m e verticale di 28 m, al 95%. Il GPS fornisce anche l'informazione del tempo; il relativo errore, sempre al 95%, è di 340 ns per l'utente civile e di 200 ns per l'utente del PPS; peraltro, negli ultimi anni i ricevitori GPS per utenti civili hanno raggiunto precisioni sensibilmente migliori dei valori di specifica esposti sopra. Le principali componenti dell'errore, la propagazione ionosferica e la degradazione intenzionale sono correlate sia temporalmene sia spazialmente; l'errore evolve 'lentamente' ed è molto simile per due ricevitori distanti decine di km o meno. Pertanto si può migliorare la precisione con la tecnica differenziale (GPS differenziale o DGPS), nella quale un'apposita stazione di riferimento a terra, dotata di ricevitore GPS in posizione accuratamente nota, rileva gli errori e diffonde le relative correzioni (o in termini di pseudo-range o in termini di posizione) tramite canale radio, di solito in VHF. Si eliminano così gli errori comuni all'utente e alla stazione di riferimento ottenendo, per gli utenti civili e fino a una cinquantina di km dalla stazione, errori residui dell'ordine di 5 m nel piano orizzontale (LADGPS, Local Area Differential GPS). Sistemi DGPS regionali (WADGPS, Wide Area Differential GPS), basati su una rete di stazioni di riferimento e di trasmissione dati usando satelliti, permettono di realizzare il DGPS su aree continentali, estese fino a 3000÷4000 km. Infine, mediante l'inseguimento della fase della portante del segnale GPS, oltre che del suo codice, un opportuno ricevitore può determinare la propria posizione con precisioni dell'ordine delle decine di centimetri o anche dei centimetri nella modalità differenziale, e addirittura millimetriche con tecniche più complesse, non in tempo reale.
Negli anni Novanta è iniziato l'uso civile del GPS (e successivamente del GLONASS: già dal 1997 sono disponibili ricevitori a 24 canali, 12 GPS e 12 GLONASS, di fabbricazione sia europea sia statunitense) per la navigazione aerea, navale e terrestre. Gli stringenti requisiti di sicurezza della navigazione aerea richiedono complessi sistemi di correzione differenziale e di integrità del GPS (l'integrità è la capacità di segnalare in tempo utile all'utente eventuali situazioni in cui la precisione del sistema è fuori da prefissati limiti di tolleranza) basati su infrastrutture a terra e su satelliti geostazionari, dando luogo ai cosiddetti GNSS-1 (Global Navigation Satellite System 1): tali sistemi sono in corso di sviluppo negli USA (con la denominazione WAAS, Wide Area Augmentation System, che permetterà su tutto lo spazio aereo statunitense precisioni di 5÷7 m in verticale e di 3÷5 m in orizzontale), in Europa (EGNOS, European Geostationary Navigation Overlay System, molto simile al WAAS) e in Giappone (MTSAT, Multi Transport SATellite-based augmentation system,), in vista di un loro funzionamento iniziale previsto per il 2000. Proprio a partire da quest'anno gli USA hanno pianificato lo smantellamento della loro rete di radiofari per la navigazione aerea e la sostituzione con il sistema WAAS e, per gli atterraggi di maggior precisione (CAT ii e CAT iii), con sistemi di complemento e integrità locali (Local Area Augmentation System, LAAS).
Il fatto che il GPS e il GLONASS siano gestiti da singoli Stati (USA e Federazione Russa) crea evidenti problemi istituzionali per il loro uso come futuro sistema civile di navigazione satellitare a livello internazionale. Per questo è allo studio un sistema denominato GNSS-2, capace di soddisfare i requisiti di precisione, continuità, integrità e disponibilità della navigazione aerea e intermodale, per il quale sono state proposte diverse architetture e soluzioni tecniche, compatibili con i diffusissimi ricevitori GPS.
L'Unione Europea agli inizi del 1999 ha deciso di sviluppare un proprio sistema GNSS-2, chiamato Galileo, che sarà globale, aperto, pienamente compatibile col GPS ma da esso indipendente, con un contributo significativo della Federazione Russa. Galileo sarà basato su satelliti in orbita intermedia (Medium Earth Orbit, MEO) e costerà tra i 2,2 e i 2,9 miliardi di euro.
Nello stesso periodo gli USA hanno annunciato un programma di modernizzazione del GPS, con il quale i satelliti trasmetteranno due nuovi segnali civili: uno alla frequenza L2 ( già utilizzata dal segnale in codice P), l'altro alla nuova frequenza di 1176,45 MHz, per applicazioni dalle quali dipende la sicurezza delle persone (per es. il trasporto aereo).
Riguardo all'evoluzione del GPS, a partire dal 2003 verranno lanciati (al ritmo medio di quattro all'anno e fino al 2009) i satelliti del Blocco ii F con vita di progetto 15 anni (alcuni di essi saranno operativi fino al 2025); la successiva generazione, denominata GPS iii, mantenendo la compatibilità con i ricevitori attuali, dovrebbe integrare i requisiti militari e civili.
bibliografia
J.C. Curlander, R.N. Mc Donough, Synthetic aperture radar systems and signal processing, New York 1991.
Proceedings of the 45th Congress of the International astronautical federation, 9-14 October, Paris 1994.
Proceedings of EUSAR 96, ed. R.Klemm, W. Keidel, J. Ender, Königswinter, 26-28 March 1996, Frankfurt am M. 1996.
Special issue on Global Positioning System, in Proceedings of the IEEE, January 1999, pp. 33-172.
Tecniche e strumenti per il telerilevamento ambientale, a cura di A. Gilardini, Roma 1999.