
Sensori
Sensori
Un sensore è un dispositivo in grado di rilevare una grandezza interagendo con essa: l’energia ricevuta dal sensore modifica lo stato della grandezza variando una delle sue proprietà (lunghezza, resistenza elettrica e così via). Il termine sensore è spesso utilizzato in luogo di trasduttore, il quale è invece più precisamente un dispositivo che converte una grandezza in un’altra di natura diversa. Poiché all’interazione con una grandezza è associata in genere anche l’operazione di conversione, si può definire sensore un dispositivo che acquisisce in ingresso una certa grandezza e ne fornisce in uscita una di natura differente, ma legata alla prima da una legge nota. La grandezza in uscita dal sensore, una volta elaborata da un opportuno sistema condizionatore, è inviata a uno strumento di misura detto strumento terminale (si parla in tal caso di sistema a catena aperta), oppure a un sistema di controllo (si parla allora di sistema a catena chiusa). Il condizionatore fornisce una grandezza analogica, spesso convertita in una digitale di più facile trattamento ed elaborazione.
L’interesse per i sensori è in continua crescita, data l’esigenza di misurare grandezze fisiche, chimiche e biologiche nell’ambito di numerose aree applicative: monitoraggio di apparecchiature, processi industriali, analisi e diagnostica medica, robotica, controlli ambientali, costruzioni civili.
Sono moltissimi infatti i sistemi le cui prestazioni sono migliorate grazie all’impiego di sensori. Le automobili, per esempio, un tempo quasi del tutto prive di sensori, hanno ormai al loro interno vari tipi di dispositivi in grado di verificare il corretto funzionamento di parti e sottosistemi. Tutto ciò ne aumenta la sicurezza, la capacità di prevenzione dei guasti e il controllo delle condizioni di inquinamento ambientale. Sono stati inseriti, infatti, sensori di tipo fisico in ausilio all’impianto elettrico e agli apparati meccanici ma anche di tipo chimico per controllare in tempo reale le condizioni di funzionamento dell’apparato motore e le caratteristiche dei gas di scarico. Il flusso di informazioni che ne deriva deve essere spesso analizzato in tempo reale, così da modificare in modo opportuno le condizioni di funzionamento e i parametri critici, in presenza di eventuali problemi. Si ricorre pertanto a particolari sistemi automatici in grado di acquisire, memorizzare, elaborare tali informazioni (sistemi di acquisizione dei dati).
I sensori di grandezze fisiche si differenziano a seconda della grandezza rilevata (per es., meccanica, elettrica, termica) oppure del principio di funzionamento, ovvero della grandezza di uscita (per es., meccanica, elettrica, ottica). Nel caso dei sensori di tipo elettrico (oggi i più utilizzati), le grandezze in uscita (analogiche o digitali) sono sempre convertibili in tensioni elettriche, più semplici da elaborare.
Le principali caratteristiche di un sensore sono: campo di misura, sensibilità, precisione (immunità dal rumore, insensibilità a grandezze diverse, assenza di deriva), finezza (il sensore non deve perturbare la grandezza da rilevare e quindi le sue dimensioni devono essere modeste), rapidità, economicità. Spetta alla fase di progettazione cercare un compromesso accettabile tra queste caratteristiche, in vista dei compiti specifici che il sensore dovrà svolgere.
Tipologie di sensori fisici
I sensori possono essere classificati sulla base del tipo di grandezza rilevata: meccanica (posizione, velocità, accelerazione, pressione, forza, deformazione, massa, densità, momento, vibrazioni ecc.); termica (temperatura, calore specifico, conducibilità termica ecc.); acustica (livello sonoro ecc.); elettrica (carica, intensità di corrente, tensione, resistenza elettrica ecc.); magnetica (intensità di campo, permeabilità ecc.); ottica; elettromagnetica.
Per quanto riguarda le grandezze elettriche e magnetiche si parla più propriamente di sonde, mentre per le grandezze ottiche ed elettromagnetiche piuttosto che all’ampiezza o alla frequenza delle onde si fa riferimento in genere all’intensità (si ricorre, a tale scopo, a celle fotoelettriche e a celle fotoconduttive, sensibili a radiazioniluminose, infrarosse e così via). Riguardo alle grandezze acustiche si utilizzano, tenuto conto della natura del suono, particolari sensori di vibrazioni. In definitiva con sensori di grandezze fisiche ci si riferisce soprattutto a sensori di grandezze meccaniche e termiche.
Fatta questa premessa, risulta più razionale classificare e quindi studiare i sensori in base al principio di funzionamento, ovvero alla grandezza di uscita; si farà quindi riferimento in seguito a sensori di tipo meccanico, elettrico, ottico (o meglio, sensori a fibra ottica). Dal momento che i sensori di tipo elettrico sono i più utilizzati, quelli di tipo meccanico costituiscono nella maggior parte dei casi sensori primari la cui uscita viene poi convertita in una grandezza elettrica da sensori secondari. I sensori a fibra ottica, di più recente realizzazione e diffusi al momento soprattutto in campo scientifico, cominciano ad affermarsi anche in altri campi. Lo studio dei sensori in base al principio di funzionamento e la classificazione di specifiche tipologie risulta più razionale anche con riferimento ai condizionatori a valle dei sensori, che vengono scelti proprio in base alle specifiche tipologie.
I sensori digitali funzionano su principî diversi rispetto a quelli analogici, cui si è fatto sin qui riferimento.
Di particolare interesse risultano infine i sensori utilizzati per rilevare mappe di grandezze, in particolare temperature e pressioni.
Sensori meccanici
Nei sensori di tipo meccanico sia la grandezza d’ingresso sia quella d’uscita sono prevalentemente grandezze meccaniche (o termiche). Essi possono essere suddivisi, in base al principio di funzionamento, in sensori di contatto, elastici, inerziali, termici e idropneumatici.
I sensori di contatto sono sensori in cui sia la grandezza di ingresso sia quella d’uscita sono uno spostamento (lineare o angolare); esempi di sensori di questo tipo sono i leveraggi e gli ingranaggi. I sensori di contatto sono elementi di trasmissione del segnale; la grandezza uscente è della stessa natura della grandezza entrante e può anche avere lo stesso valore.
Nei sensori elastici la grandezza di ingresso (forza, coppia, pressione) provoca una deformazione di un elemento elastico, generando pertanto in uscita una deformazione, ovvero uno spostamento lineare o angolare. Appartengono a questa tipologia gli elementi sensibili a sollecitazioni di trazione, di compressione, di flessione (entra una forza, esce uno spostamento lineare), gli elementi sensibili a sollecitazioni di torsione (entra una coppia, esce uno spostamento angolare), le molle Bourbon, i diaframmi (entra una pressione, esce uno spostamento lineare o una deformazione) e così via.
I sensori inerziali sono quelli in cui l’elemento ricevente è una massa su cui agisce una forza di volume (di inerzia, di gravità ecc.). Fanno parte di questa categoria gli accelerometri, in cui entra un’accelerazione ed esce una forza; il pendolo, in cui entra l’accelerazione di gravità ed esce un periodo di oscillazione; la colonna liquida, in cui entra una pressione ed esce uno spostamento lineare.
Nei sensori termici l’elemento sensibile sente una variazione di temperatura dilatandosi o aumentando di pressione; la dilatazione può essere lineare (termometri a lamina bimetallica, in cui entra una variazione di temperatura ed esce una rotazione provocata da una dilatazione differenziale) o di volume (termometri a bulbo in cui entra una variazione di temperatura ed esce uno spostamento lineare). Nei termometri a liquido, a gas o a vapore, in cui il volume dei fluidi viene mantenuto costante, entra una variazione di temperatura ed esce una variazione di pressione.
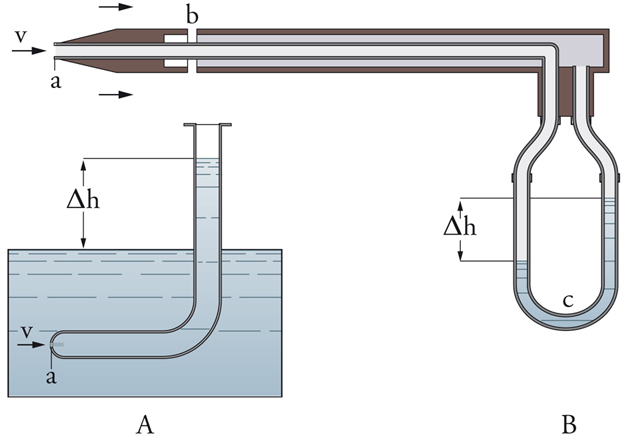
I sensori idropneumatici sono sensori in cui una corrente fluida subisce una variazione di sezione, incontra un ostacolo di forma opportuna e viene deviata. Appartengono a questa categoria: i tubi di Pitot, in cui entra una velocità ed esce una differenza di pressione; i venturimetri; i boccagli; i diaframmi, in cui entra una portata, esce una differenza di pressione; le ventoline e i dispositivi a turbina, in cui entra una velocità o una portata ed esce una velocità angolare. Nel tubo di Pitot (fig. 2), in particolare, la differenza di pressione è quella fra pressione totale e pressione statica della corrente fluida; questo sensore trova applicazione soprattutto in campo aeronautico, a bordo degli aeromobili; per la sua semplicità e per la sua precisione, è usato nelle gallerie del vento come strumento campione.
Sensori elettrici
Tali dispositivi possono essere di tipo passivo e attivo: i primi sono costituiti da un componente resistivo, induttivo o capacitivo in cui la resistenza, l’induttanza e la capacità cambiano al variare di una grandezza meccanica o termica; i secondi sono sensori in cui la tensione di uscita è ottenuta in virtù di un particolare effetto fisico (come per es., piezoelettrico, termoelettrico).
Sensori di tipo passivo
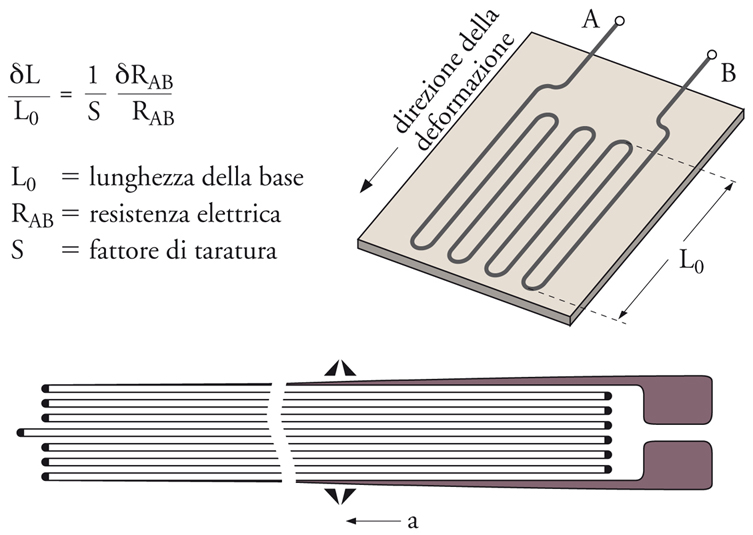
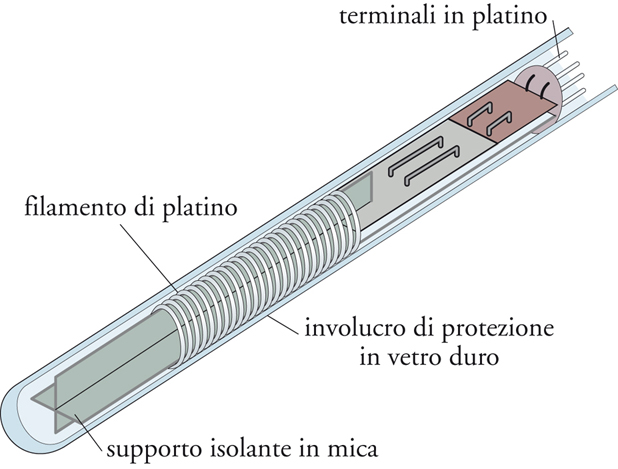
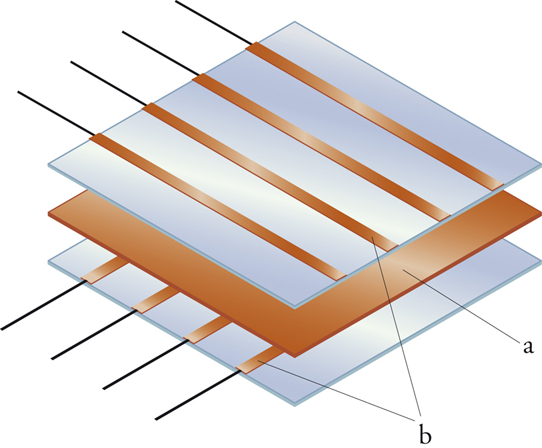
I sensori resistivi (per es., conduttori metallici) sfruttano la relazione costitutiva della resistenza di un conduttore metallico, data da R=ϱl/S, ove ϱ è la resistività del materiale conduttore, l la sua lunghezza, S la sua sezione. Diverse sono le cause che possono far variare la resistenza di un conduttore. Nei sensori potenziometrici (potenziometri lineari e angolari) entra uno spostamento lineare o angolare ed esce una variazione di resistenza dovuta alla diversa lunghezza del conduttore impegnata da un elemento di contatto strisciante. In quelli estensimetrici (estensimetri elettrici a resistenza) entra una deformazione ed esce una variazione di resistenza dovuta alle variazioni di resistività, lunghezza, sezione. Gli estensimetri sono costituiti da un sottilissimo conduttore, la griglia, generalmente in lega di nichel, disposta a serpentina (zig-zag) su un supporto isolante (base), anch’esso molto sottile (fig. 3); quest’ultimo trasmette alla griglia le deformazioni del corpo su cui l’estensimetro viene incollato; l’ingombro è ridotto al minimo e la sensibilità è elevata (è possibile apprezzare deformazioni dell’ordine del μm/m, con una notevole rapidità). Queste caratteristiche rendono gli estensimetri elettrici a resistenza sensori con numerose applicazioni, in campo sia industriale (monitoraggio, anche dinamico, di stati di sollecitazione di macchine e apparecchiature) sia scientifico. Nei sensori termoresistivi (TRP, Termometri a resistenza di platino), costituiti da un sottile filamento conduttore opportunamente supportato e protetto (fig. 4), entra una variazione di temperatura e ne esce una di resistenza dovuta alla variazione di resistività. Questi sensori sono caratterizzati da una notevole precisione e per questa ragione, anche se potrebbe essere impiegato qualunque conduttore, nella pratica si fa uso solamente del platino per la sua elevata sensibilità e linearità in un ampio intervallo di temperature. Nei sensori anemometrici (anemometri a filo caldo) entra una variazione di velocità ed esce una variazione di resistenza dovuta al cambiamento di temperatura conseguente allo scambio termico. L’anemometro è costituito da un sottilissimo filamento, opportunamente supportato e riscaldato per effetto Joule dal passaggio di corrente (fig. 5): all’aumentare della velocità della corrente fluida aumenta il calore ceduto dal fluido e diminuiscono la temperatura e la resistenza. Nel caso di conduttori non metallici ovvero di semiconduttori, si possono verificare variazioni di resistenza, come accade con l’effetto piezoresistivo (variazione della resistenza causata da una sollecitazione), e ciò consente di realizzare sensori di pressione. La variazione di resistenza può essere dovuta anche a variazioni di temperatura, come avviene nei termometri a semiconduttore (termistori), oppure può essere causata da una radiazione luminosa o infrarossa (cellule fotoconduttive).
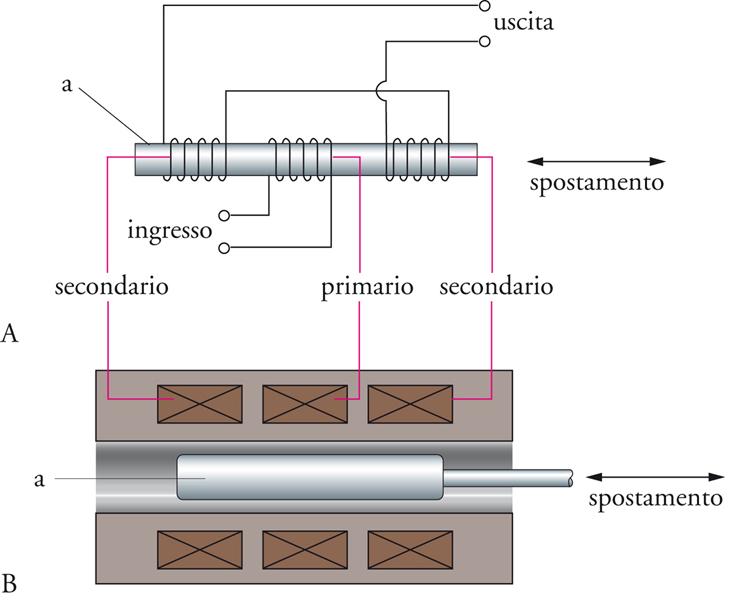
Nei sensori induttivi si tiene conto del fatto che il valore dell’induttanza di una bobina è fornito dalla formula L=μ0μrn2S/l, dove μ0 è la permeabilità magnetica nel vuoto, μr quella nel mezzo, n è il numero di spire della bobina, l la sua lunghezza e S la sua sezione. È così possibile realizzare sensori in cui un nucleo ferromagnetico si muove all’interno di una bobina: entra uno spostamento lineare ed esce una variazione di induttanza dovuta al diverso numero di spire concatenate con la bobina. Altri tipi di sensori, quali i sensori di prossimità, sono quelli in cui una bobina è posta in prossimità della superficie di un elemento ferromagnetico: cambiando la distanza relativa fra superficie dell’elemento ferromagnetico e bobina si verifica una variazione di induttanza dovuta alla variazione del flusso magnetico concatenato con la bobina stessa (ovvero alla variazione di riluttanza del circuito magnetico). Da ultimo menzioniamo i sensori in cui due bobine sono accoppiate induttivamente da un nucleo ferromagnetico mobile: il primario è alimentato ad altissima frequenza (5÷10 kHz), mentre il secondario è costituito da due parti disposte simmetricamente rispetto al primario, perfettamente identiche salvo che per il verso dell’avvolgimento (fig. 6). La grandezza d’ingresso è pertanto uno spostamento lineare, mentre quella d’uscita è una variazione di mutua induttanza dovuta al diverso numero di spire delle due parti del secondario concatenate con il primario. In altri termini, se il nucleo è disposto simmetricamente rispetto a primario e secondario, a uno spostamento del nucleo corrisponde una tensione risultante al secondario in fase o in opposizione di fase con quella del primario a seconda del verso dello spostamento. Questo tipo di sensore induttivo è detto LVDT (Linear differential variable trasformer) ed è caratterizzato da rapidità e sensibilità elevate essendo in grado di apprezzare spostamenti dell’ordine del μm.
Nei sensori capacitivi si sfrutta la dipendenza della capacità di un condensatore dalle sue proprietà geometriche o dal materiale dielettrico posto tra le due armature. Nel caso di un condensatore a facce piane parallele, per esempio, il valore della capacità è espresso dalla formula C=ε0εrS/d, dove ε0 è la costante dielettrica del vuoto, εr quella del mezzo, S la superficie delle armature del condensatore, d la loro distanza. Si possono così realizzaresensori in cui entra uno spostamento lineare ed esce una variazione di capacità dovuta a un avvicinamento (o allontanamento) fra le armature del condensatore (tale spostamento può essere anche dovuto a una sollecitazione normale); alternativamente, l’ingresso può essere costituito da uno spostamento angolare dovuto a una rotazione di una delle armature (le rotazioni in oggetto possono essere dovute a sollecitazioni di taglio o a coppie). Per la capacità dei condensatori a geometria diversa da quella a facce piane parallele valgono espressioni analoghe.

Nei sensori di livello a geometria cilindrica, invece, una delle armature del condensatore è costituita da un conduttore assiale: al variare del livello del liquido, e dunque della costante dielettrica del mezzo, muta la capacità del condensatore (fig. 7).
Sensori di tipo attivo
I sensori di tipo attivo si basano prevalentemente sugli effetti di seguito riportati.
Effetto piezoelettrico. - In presenza di sollecitazioni meccaniche, cristalli di particolari sostanze (per es., il quarzo) si caricano elettricamente; entra pertanto una sollecitazione (normale o di taglio) ed esce una carica che viene convertita in una tensione mediante un condensatore. Sull’effetto piezoelettrico è basato il funzionamento di vari tipi di sensori (di accelerazione, di pressione, di forza, di vibrazione) che sono caratterizzati da elevatissima rapidità. I microfoni per misure di livello sonoro, per esempio, sono basati su questo effetto.
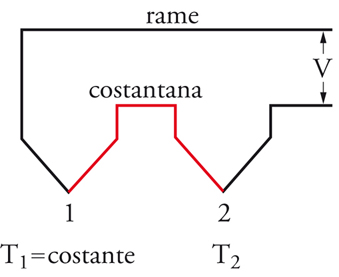
Effetto termoelettrico. - Due conduttori di natura differente con due giunzioni a temperatura diversa costituiscono un circuito in cui scorre una corrente elettrica; aprendo il circuito e mantenendo una giunzione a temperatura costante (giunto freddo), nell’altra giunzione (giunto caldo) entra una temperatura ed esce una tensione (fig. 8). Su questo effetto è basato il funzionamento dei termometri a termocoppia; le coppie di conduttori più utilizzate sono rame-costantana, chromel-alumel, ferro-costantana e chromel-costantana; ad alte temperature si ricorre alle coppie platino-platino/rodio. Questi sensori, detti termoelettrici, sono particolarmente rapidi e fini tenuto conto delle ridotte dimensioni dell’elemento sensibile (il giunto caldo).
Una loro applicazione particolare è data dalle termopile, costituite da più termocoppie in serie poste a contatto con una superficie nera in grado di assorbire la radiazione termica e utilizzate pertanto nelle misure di temperatura senza contatto.
Effetto Hall. - Agli estremi di un conduttore che si muove in campo magnetico si manifesta una differenza di potenziale: entra una velocità lineare o angolare ed esce pertanto una tensione elettrica.
Effetto fotoelettrico. - Su di esso si basano il funzionamento delle celle fotoelettriche o sensori fotoelettrici. In questo caso, entra una radiazione luminosa (associata per es. a una sorgente termica) ed esce una tensione elettrica. L’effetto fotoelettrico è sfruttato per la realizzazione di celle fotoemissive, basate sull’emissione di elettroni dalla superficie di alcuni materiali colpiti da radiazioni di appropriata lunghezza d’onda, e anche fotovoltaiche, basate sulle forze elettromotrici nelle giunzioni metallo-semiconduttore (o semiconduttore p-semiconduttore n) dovute all’azione di radiazioni luminose. I sensori fotoelettrici possono essere utilizzati in misure di temperatura senza contatto analogamente alle termopile, cui vengono preferiti per la maggior rapidità nonostante la banda più limitata.
Accoppiamento tra sensori meccanici e sensori elettrici
Nei sensori di tipo meccanico la grandezza in uscita è generalmente uno spostamento lineare o angolare (o una grandezza di natura diversa ma comunque convertibile in uno spostamento). Esso – eventualmente amplificato da leveraggi o ingranaggi – è riportato su una scala graduata negli strumenti a lettura diretta oppure su un foglio di carta in movimento negli strumenti registratori. Gli strumenti meccanici hanno il vantaggio di essere molto semplici e in alcuni casi particolarmente precisi, ma la sensibilità, la finezza e la rapidità risultano in genere limitate. Nei sensori di tipo elettrico la grandezza d’uscita è invece una tensione (sensori di tipo attivo) oppure risulta convertibile in essa mediante un apposito circuito a ponte (ponte di Wheatstone, nel caso di piccole variazioni della grandezza in uscita) o un circuito voltamperometrico (nel caso di elevate variazioni della grandezza di uscita).
Disporre di una tensione in uscita consente di effettuare per via elettrica importanti operazioni: la tensione che giunge al condizionatore può essere filtrata, integrata o derivata e soprattutto può essere amplificata con guadagno elevato, a tutto vantaggio della sensibilità dell’intero procedimento; quella uscente dal condizionatore può a sua volta essere visualizzata da dispositivi come l’oscilloscopio oppure acquisita e registrata da dispositivi digitali mediante opportuni convertitori analogico/digitali. Per queste ragioni, è utile che la grandezza in uscita dai sensori di tipo meccanico sia convertita in una grandezza elettrica: l’apparato di misura si presenta allora come un sensore primario di tipo meccanico, interfacciato alla grandezza da misurare, connesso a un sensore secondario di tipo elettrico.
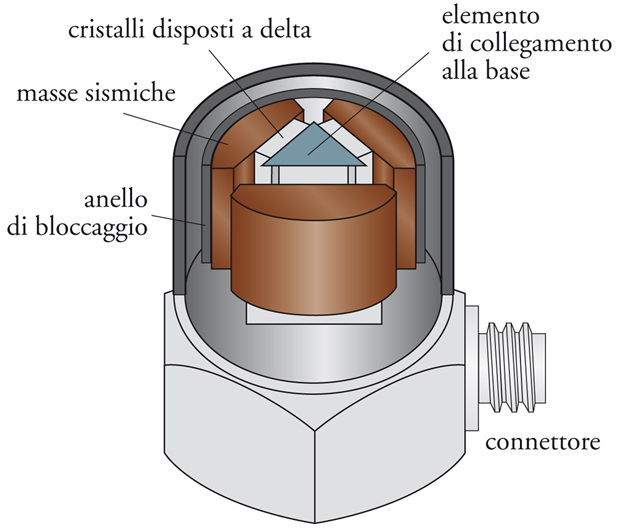
Si riportano di seguito alcuni esempi di accoppiamento tra sensori primari e secondari. Un sensore di accelerazione (accelerometro piezoelettrico) può essere realizzato mediante una massa sismica, che converte tale accelerazione in una forza (sensore primario), combinata con un cristallo piezoelettrico solidale alla massa sismica (sensore secondario). Questo converte la forza in una carica elettrica e quindi in una tensione (fig. 9). Integrando due volte la tensione uscente, si ottiene un sensore di spostamento utilizzabile, in particolare, qualora sia necessaria un’elevata rapidità (vibrometro piezoelettrico).
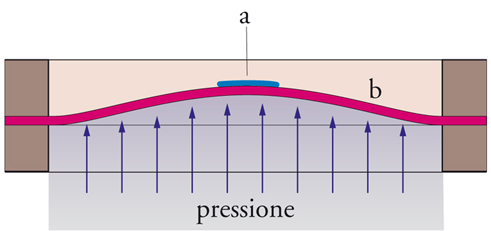
Un sensore di pressione (manometro a membrana), può essere realizzato sia mediante una membrana elastica che converte la pressione in una deformazione, sia da un estensimetro elettrico a resistenza che converte la deformazione in una variazione di resistenza elettrica (fig. 10); analogamente, un sensore di forza (cella di carico) può essere costituito sia da un elemento elastico (cilindretto, piccola trave incastrata) che una volta sollecitato si deforma, sia da estensimetri elettrici a resistenza.
Un sensore di spostamento, infine, può essere costituito da un dispositivo di contatto che trasmette gli spostamenti rilevati al nucleo ferromagnetico di un sensore induttivo tipo LVDT. Un’apparecchiatura di questo tipo può essere utilizzata per realizzare strumenti come il rugosimetro e il dilatometro.
Gli esempi riportati confermano quanto detto sopra: se per rilevare una grandezza meccanica o termica vengono utilizzati specifici sensori, i procedimenti per ottenere le tensioni elettriche, una volta effettuata la conversione di grandezza meccanica in grandezza elettrica, sono generalmente simili; ciò consente di realizzare una vasta gamma di sensori senza dover associare a ciascuno di essi un condizionatore dedicato.
Sensori a fibra ottica
Le fibre ottiche possono essere configurate per realizzare rilevatori di grandezze diverse (temperatura, pressione, deformazione). Le fibre impiegate nel campo delle telecomunicazioni sono poco costose ma generalmente inadatte ad applicazioni a sensori cui sono richieste prestazioni di tipo particolare. Occorre pertanto utilizzare in maniera opportuna il tipo di fibra adottato (multimodo, a modo singolo), tenendo conto del fatto che la struttura di base di un sensore a fibra ottica è costituita da una sorgente luminosa (in particolare un laser), un elemento sensibile (la fibra) e un fotorilevatore (rilevatore di radiazioni luminose).
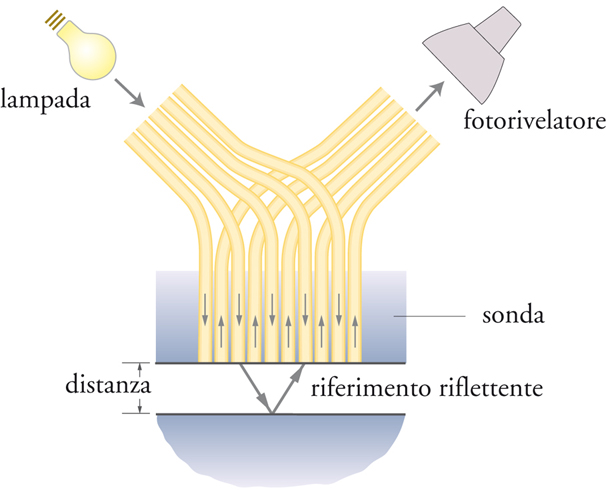
A seconda del principio di funzionamento i sensori a fibre ottiche possono essere classificati in due categorie: quelli di intensità, in cui viene modulata l’intensità della luce che percorre le fibre; quelli, affermatisi successivamente, di fase, nei quali vengono fatti interferire un fascio di misura convogliato nella fibra e uno di riferimento ottenuto per divisione dello stesso fascio. A seconda dell’utilizzazione della fibra ottica, i sensori vengono inoltre classificati in sensori intrinseci, nei quali essa capta la grandezza da rilevare, e in sensori estrinseci, nei quali la fibra funge da veicolo per l’informazione da rilevare e trasmettere. Un sensore di spostamento può essere realizzato mediante un sensore d’intensità di tipo estrinseco utilizzando un fascio di fibre multimodo, in parte trasmittenti e in parte riceventi, in cui la luce emessa dalle fibre trasmittenti viene riflessa da una superficie-riferimento (fig. 11). Se l’estremità del sensore è a contatto con la superficie, la riflessione è nulla; a mano a mano che questo si allontana aumenta linearmente l’intensità della luce riflessa (rilevata dalle fibre riceventi) fino a un valore di picco; superata una certa distanza l’intensità diminuisce. In tal modo si possono misurare non soltanto gli spostamenti ma anche le grandezze che li provocano. Rendendo una fibra ottica solidale a una struttura si può realizzare un sensore di deformazione (estensimetro a fibra ottica): la deformazione della struttura provoca un allungamento (o un accorciamento) della fibra ottica e una variazione del suo indice di rifrazione; tutto ciò dà luogo a una variazione del cammino ottico della luce, che viene poi rilevata con tecniche interferometriche. L’apparecchiatura è in questo caso un sensore di fase di tipo intrinseco; analogamente a quanto accade per gli estensimetri elettrici a resistenza, se applicati a elementi elastici quelli a fibra ottica possono essere utilizzati come sensori di pressione o di forza. Il sensore di temperatura è equivalente a quello di deformazione e può essere realizzato disponendo una fibra ottica nel mezzo di cui si vuole misurare la temperatura: le variazioni di temperatura provocano un allungamento della fibra e una mutazione del suo indice di rifrazione, quindi una variazione del cammino ottico della luce. Sempre con sensori di fase, ma di tipo estrinseco, si possono realizzare sensori di vibrazione: inviando tramite fibra e mediante un’apposita sonda una radiazione laser su un elemento meccanico in vibrazione, la radiazione viene riflessa dall’elemento, raccolta dalla sonda e riconvogliata in fibra; l’andamento della vibrazione viene, al solito, rilevato facendo interferire la radiazione riflessa con una radiazione di riferimento.
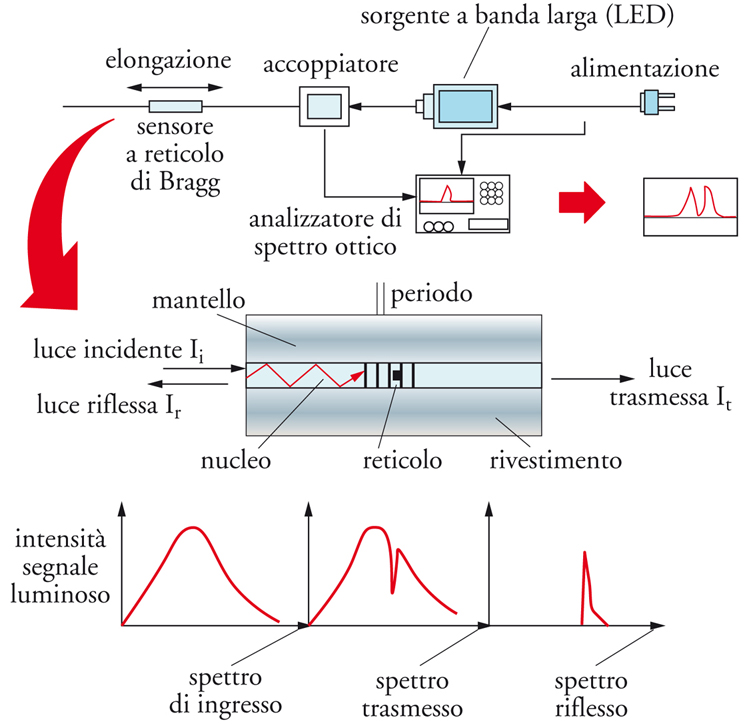
Sensori a fibra ottica più moderni sono i sensori a reticolo di Bragg: realizzando un reticolo avente un certo passo p in una fibra, vengono riflesse le radiazioni di lunghezza d’onda dell’ordine di 2p (fig. 12); poiché il passo del reticolo può dipendere dalla temperatura o soprattutto dalla deformazione, misurando la lunghezza d’onda della radiazione riflessa si possono realizzare rilevatori di tali grandezze. Questo tipo di sensori si sta rapidamente affermando per la possibilità di disporne una considerevole quantità su una singola fibra realizzando più reticoli di passo diverso.
I sensori a fibra ottica, anche se meno diffusi di quelli elettrici, sono oggi ampiamente commercializzati e trovano applicazione soprattutto in campo scientifico; altri usi sono relativi al monitoraggio di costruzioni civili: nel caso di una struttura cementizia, in particolare, il sensore può essere inserito in fase di getto nel conglomerato stesso e rilevarne le deformazioni. Il vantaggio dei sensori a fibra ottica rispetto a quelli di tipo elettrico è dovuta all’insensibilità alle radiazioni elettromagnetiche; di contro, il costo di tutta la catena è nettamente superiore. Inoltre, tenuto conto della bassissima attenuazione dei segnali ottici che si propagano nelle fibre, i sensori possono essere installati a grande distanza dalla sorgente luminosa e dal fotorilevatore.
Sensori digitali
I sensori sin qui esaminati forniscono segnali analogici, che possono essere visualizzati mediante strumentazione analogica o essere convertiti in segnali digitali da inviare a sistemi di acquisizione. Tuttavia alcuni tipi di sensori forniscono direttamente segnali di tipo digitale, a tutto vantaggio dei successivi procedimenti di elaborazione. In generale, essi sono costituiti da elementi graduati (encoder) che generano treni di impulsi successivamente inviati a un contatore oppure forniscono un segnale numerico in codice binario.
Un sensore di spostamento o di velocità può essere costituito da una striscia graduata con riferimenti elettrici, magnetici, ottici (sensore di spostamento o velocità lineare) o da un disco graduato con riferimenti analoghi ai precedenti (sensore di spostamento o velocità angolare); i riferimenti vengono rilevati da elementi conduttori, bobine, fotocellule. Analogamente, un sensore di portata può essere costituito da una turbina con riferimenti magnetici sulle estremità delle pale: una bobina rileva il passaggio di ciascuna pala grazie agli impulsi indotti dalle variazioni di flusso magnetico (fig. 13). In tutti questi casi si generano treni di impulsi inviati a un contatore.
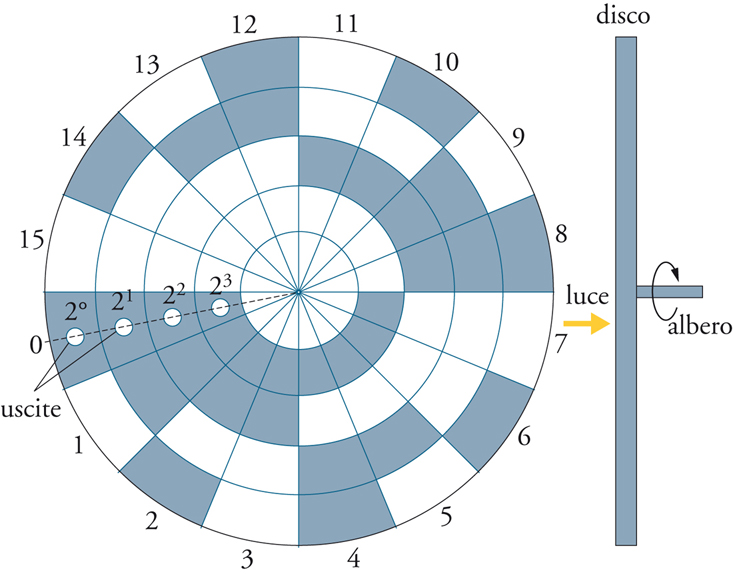
Per realizzare un sensore di posizione (lineare o angolare), si utilizzano strisce o dischi con più serie di graduazioni (più strisce nel caso di sensori lineari, più anelli nel caso dei dischi come illustrato in fig. 14), ciascuna con passo metà della precedente: in tal caso si ottiene un segnale in codice binario. La sensibilità cresce all’aumentare del numero di strisce o anelli graduati.
Sensori per mappe
La domanda di sensori con prestazioni sempre più spinte ha portato recentemente a considerare strutture complesse, formate da singoli sensori organizzati in matrici, o sistemi a scansione più o meno complessi che utilizzano un solo sensore o un insieme di essi; in tal modo è possibile rilevare una distribuzione bidimensionale di una certa grandezza.
Per quanto riguarda le temperature, si può impiegare una termocamera dotata di un elemento sensibile (generalmente un sensore fotoelettrico), una lente di focalizzazione per concentrare le radiazioni emesse, un sistema di raffreddamento per favorire lo scambio termico (così da rilevare anche mappe a temperatura ambiente) e, infine, un sistema di scansione con possibilità di rotazione attorno a due assi (così da campionare mappe a frequenze di qualche Hz). Frequenze di campionamento molto più elevate si raggiungono con matrici (array) di sensori che fanno uso di sistemi a trasferimento di carica del tipo CCD (Charge coupled device), con struttura elettronica di scansione incorporata. In particolare, le singole celle di pochi μm di lato sono ricavate depositando elettrodi semitrasparenti di alluminio su un substrato di silicio ricoperto di ossido. Tali elettrodi costituiscono una griglia di condensatori in grado di integrare la carica degli elettroni generati dalle radiazioni incidenti; al termine dell’esposizione, le cariche vengono fatte scorrere riga per riga sul registro di lettura, dal quale sono poi trasferite una per una, con ulteriore scorrimento, al circuito rivelatore. Questo mette a disposizione un’immagine, gestita se necessario da un software che fa corrispondere a temperature diverse colori differenti. Il rilevamento di mappe di temperatura (termografia) trova applicazione in campo industriale (visualizzazione di guasti, rilevamento di microfughe di fluidi, controlli non distruttivi), civile (studio del riscaldamento di edifici) e medico (diagnosi precoce di tumori che danno luogo ad anomale distribuzioni di temperature sulla pelle).
Per quanto riguarda le pressioni, si ricorre generalmente a sensori piezoresistivi; risultati significativi possono, in particolare, ottenersi interponendo un foglio piezoresistivo tra due di materiale plastico sulle cui superfici interne sono elettrodeposti due sistemi di conduttori rettilinei, fra loro perpendicolari, a contatto con il foglio sensibile; a ogni incrocio dei conduttori un elemento sensibile della matrice e 2n conduttori (invece di 2n2 indipendenti) sono sufficienti per tracciare una mappa (fig.15). Un sistema di scansione interroga, a tale scopo, la matrice per righe e per colonne; sensori di questo tipo possono avere utili applicazioni diagnostiche (per es., per lo studio della postura), ergonomiche (mappe delle pressioni di presa di un oggetto di forma diversa) o scientifiche (rilevamento delle pressioni nel contatto fra i denti di due ruote).
Per quanto riguarda le deformazioni, la miniaturizzazione degli estensimetri elettrici a resistenza (le dimensioni delle griglie possono essere di frazioni di millimetro) consente di rilevare mappe con notevole accuratezza, studiando in tal modo il comportamento meccanico in corrispondenza di singolarità di forma.
Sistemi di acquisizione
Anche se in taluni casi il segnale (tipicamente, una tensione) associato a un sensore può essere utilizzato direttamente senza ulteriori elaborazioni, più in generale esso può essere memorizzato in forma elettronica, elaborato nuovamente e visualizzato, oppure utilizzato in un sistema automatico di regolazione. La prima operazione da effettuare in questi casi consiste nell’acquisizione del segnale di uscita del sensore in forma digitale, per mezzo di opportuni dispositivi elettronici. Infatti, poiché la quasi totalità dei sistemi di elaborazione opera su segnali digitali, le grandezze rilevate dai sensori – che costituiscono i segnali di ingresso di tali sistemi – devono essere rappresentate in forma digitale, anche nei casi in cui le grandezze primarie acquisite dai sensori sono di tipo analogico.
Il processo di conversione analogico-digitale eser-cita sulle grandezze considerate due operazioni di di-scretizzazione: la prima (detta campionamento) consistenel prelevare campioni della grandezza stessa in op-portuni istanti di tempo, la seconda (detta quantizzazione) consiste nel quantizzare i valori rilevati. Dal punto di vista elettronico, tali operazioni sono effettuate per mezzo di un convertitore A/D (analogico-digitale), controllato da un apposito microprocessore (detto host computer): nella versione più semplice si tratta di una scheda di acquisizione controllata e comandata da un computer; sulla scheda stessa è presente una porta di ingresso analogica, nella quale entra il segnale presente all’uscita dal sensore. I dati acquisiti sono resi disponibili nella memoria del computer, opportunamente disposti e formattati.
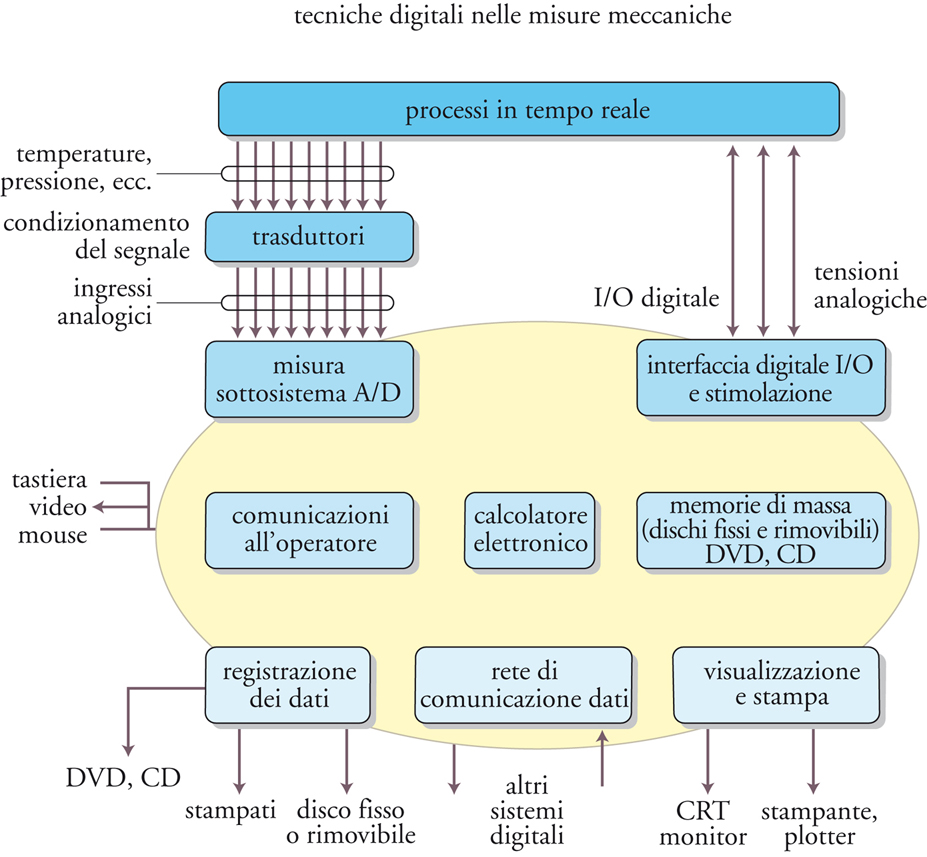
Il problema dell’acquisizione può presentarsi in forma più complessa quando più sensori forniscono informazioni simultanee su vari aspetti di un sistema complesso (monitoraggio di un evento, di un processo, di un impianto ecc.). In questi casi, la scheda di acquisizione deve essere multicanale e può funzionare secondo varie modalità, per esempio acquisendo un campione per ciascun canale in successione (fig. 16). Il sistema host computer memorizza così i dati acquisiti su tabelle diverse, in modo da poter sempre interpretare correttamente i dati e permettendo altresì di riconoscere i valori simultanei delle diverse grandezze. I parametri che definiscono le schede di acquisizione sono il numero di livelli di quantizzazione, la velocità di conversione (espressa in numero di campioni al secondo), il numero di canali da acquisire e, infine, la quantità totale dei dati che debbono essere memorizzati in forma stabile; schede di acquisizione con un numero di livelli pari o superiori a 4096 (corrispondenti a 12 bit) e con frequenza di conversione di 200 kHz sono disponibili a costi non elevati e possono essere facilmente controllate da un PC. Il numero totale dei dati da acquisire dipende dalla memoria disponibile sul PC stesso; la frequenza di conversione disponibile è una grandezza che indica quanti campioni possono essere forniti globalmente in uscita dal convertitore, indipendentemente dal numero di canali.
Il sistema di acquisizione e di elaborazione connesso a un sistema di sensori effettua delle operazioni dipendenti dall’apparato d’interesse; in alcuni casi tuttavia una parte dell’elaborazione può anche essere dedicata al miglioramento della risposta globale del sensore, ovvero all’incremento della stima della grandezza fisica rispetto alla grandezza di uscita del sensore stesso. In effetti, il sensore può anche essere considerato come un sistema che, ricevendo in ingresso la grandezza d’interesse, produce in uscita una nuova grandezza, che è una stima della precedente; nell’effettuare tale operazione il sensore può produrre distorsione (di tipo lineare o non lineare) e può sovrapporre dei segnali non desiderati a quello utile (per la presenza di rumore o di vari tipi di disturbi). Questi inconvenienti possono essere a volte corretti operando un’opportuna pre-elaborazione sul segnale d’uscita del sensore al fine di attenuare gli effetti indesiderati. Tali elaborazioni, effettuate di norma in forma digitale, possono essere costituite da filtraggi numerici, procedure di equalizzazione, deconvoluzioni e via dicendo.
Bibliografia
Claerbout 1976: Claerbout, Jon F., Fundamentals of geophysical data processing: with applications to petroleum prospecting, New York, McGraw-Hill, 1976.
Kung 1980: Kung, Hsuing-Tsung, The structure of parallel algorithms, “Advances in computers”, 19, 1980, pp. 65-112.
Kung 1983: Kung, Sun-Yuan, From transversal filter to VLSI wavefront array, in: International conference on Very Large Scale Integration (VLSI), August 16-19, Trondheim, Norway, 1983, Amsterdam-New York, North-Holland, 1983.
Lim 1983: Speech enhancement, edited by Jae S. Lim, Englewood Cliffs (N.J.), Prentice-Hall, 1983.
Makhoul 1975: Makhoul, John, Linear prediction: a tutorial review, “Proceedings of the IEEE”, 63, 1975, pp. 561-580.
Robinson, Treitel 1980: Robinson, Enders A. - Treitel, Sven, Geophysical signal analysis, Englewood Cliffs (N.J.), Prentice-Hall, 1980.
Tavola I
sensori di grandezze chimiche
di Arnaldo D’Amico, Corrado Di Natale
I sensori di grandezze chimiche sono dispositivi a stato solido in grado di reagire in presenza di concentrazioni di ioni o di molecole neutre (analiti) in fase liquida o in fase gassosa. Essi forniscono generalmente come risposta la variazione di una o più delle loro caratteristiche chimico-fisiche (momento di dipolo interno, massa, temperatura ecc.), oppure ottiche (per es., indice di rifrazione). In tutti i casi, questi sensori devono utilizzare sistemi di trasduzione che consentano il passaggio dell’informazione proveniente dall’ambiente chimico a un segnale elettrico od ottico adatto a successive elaborazioni. I rilevatori di grandezze biologiche, tenuto conto di varianti d’ingresso del sensore riguardanti essenzialmente il tipo di materiale utilizzato (per es., enzimi o antigeni) nei meccanismi di interazione con gli analiti, possono essere visti come particolari sensori di grandezze chimiche.
Un’idea dell’importanza del settore dei sensori di grandezze chimiche o biologiche si può avere considerando la varietà di specie chimiche o biologiche di cui può essere necessaria la misura (specie organiche, ioni metallici, molecole gassose ecc.) in svariati contesti tecnologici (controllo qualità degli alimenti, analisi delle acque, controllo industriale, emissione da autoveicoli, microbiologia, biomedicina).
Lo schema di principio del funzionamento di un sensore chimico e di un sensore biologico ha inizio con l’azione sensibile nei confronti delle specie chimiche o biologiche. Il sensore opera la trasformazione (trasduzione) della proprietà chimica o biologica, alterata dalla presenza dell’analita, in una proprietà di natura elettrica o ottica. Successivamente viene eseguita la misura elettrica con un’opportuna preelaborazione del dato, al fine di ridurre quanto più possibile il rumore. La risoluzione del sensore dipende infatti dalla concentrazione minima dell’analita in grado di dar luogo a un segnale distinguibile in uscita dal trasduttore (perché più intenso del rumore di fondo proprio del sistema di misura). Come ultimo passaggio, di norma si procede alla conversione del segnale analogico in segnale digitale allo scopo di utilizzare con più efficacia le tecniche di analisi dati e di presentazione dei risultati. L’intero procedimento di misura ed elaborazione del dato avviene in tempi brevi, dell’ordine dei microsecondi. Tuttavia, la prontezza del sensore è condizionata dal ruolo della parte chimica o biologica nel meccanismo di interazione. Quest’ultima può essere relativamente lunga e durare anche alcuni minuti. L’interazione dell’analita o degli analiti con il materiale chimicamente o biologicamente sensibile può dare luogo a una varietà di effetti, a cui corrisponde una varietàdi dispositivi usati per rilevarli. Il calore liberato dall’interazione dell’analita con il materiale chimicamente attivo può provocare, per esempio, una variazione di temperatura che viene rilevata con un termistore, una termocoppia o una termopila; oppure, l’interazione può essere accompagnata da uno scambio di cariche con il sensore, con conseguente variazione della conduciblità elettrica; o ancora, la presenza dell’analita può produrre la variazione della frequenza di oscillazione di un cristallo di quarzo.
Tra i più rappresentativi sensori chimici si segnalano quelli elettrochimici, essenzialmente classificati nelle tre tipologie seguenti: amperometrici, potenziometrici e conduttometrici.
Sensori amperometrici. Utilizzano la misura di una corrente mantenendo il potenziale a un valore costante. Il sistema di misura coinvolge, nella versione più semplificata, due elettrodi: quello di lavoro e quello di riferimento. Due esempi sono l’elettrodo di Clark per la misura della concentrazione di ossigeno, e le celle a combustibile per la misura di vari gas.
Sensori potenziometrici. Consentono la misura della differenza di potenziale tra l’elettrodo di misura e quello di riferimento, il quale deve essere caratterizzato da elevata stabilità. Con questa tecnica non viene consumata potenza né viene alterata la concentrazione dell’analita. Appartengono a tale categoria gli elettrodi selettivi di ioni e i dispositivi a effetto di campo come i condensatori MOS e i MOSFET
Sensori conduttometrici. L’impiego di due elettrodi d’oro o platino in soluzione consente la misura della variazione di conducibilità legata alla variazione e alla tipologia degli ioni presenti in soluzione. A questa categoria appartengono anche i sensori coulombometrici, che operano sulla misura della carica totale invece che della corrente. Essi consentono una misurazione assoluta che non richiede particolari procedimenti di calibrazione.
I rilevatori di gas a ossidi metallici semiconduttori rappresentano un altro tipo di sensore chimico di notevole rilevanza per relativa semplicità, funzionalità e basso costo. Essi sono basati sull’impiego di ossidi metallici semiconduttori e in particolare dell’ossido di stagno, impiegato come sensore per la rivelazione del monossido di carbonio (CO), prodotto di elevata tossicità dei processi di combustione.
Il biossido di stagno, in forma di film sottili, si presenta dopo la sua fabbricazione e i necessari trattamenti termici come un materiale policristallino, composto di grani a contatto caratterizzati da media conducibilità (circa 10 mS). In presenza di aria e a temperature comprese nell’intervallo 250÷500 °C, parte delle molecole di ossigeno in fase gassosa vengono dissociate e adsorbite sulla superficie del materiale. Poiché ogni atomo di ossigeno lega a sé due elettroni, l’adsorbimento di ossigeno si traduce in una diminuzione della conducibilità elettrica del sensore. L’arricchimento di ossigeno alla superficie consente al biossido di stagno di funzionare come sensore per la rivelazione di specie gassose riducenti (come il monossido di carbonio) o ossidanti (come il biossido di azoto). Nel caso del monossido di carbonio, l’adsorbimento di queste molecole sulla superficie del sensore, combinato con l’alta temperatura del film, comporta la formazione e la liberazione di CO2, con conseguente diminuzione del numero di atomi di ossigeno legati sulla superficie del sensore. La diminuzione del numero di atomi di ossigeno produce un rilascio di elettroni liberi che vanno così ad aumentare la conducibilità elettrica del materiale sensibile.
Il tasso di interazione in questi sensori può essere modificato tramite la deposizione, sulla superficie del sensore, di piccole quantità di metalli catalitici come palladio, platino o cromo: il materiale così trattato acquista una sensibilità anche nei confronti di altre specie chimiche. Questa caratteristica può essere vista come un difetto quando si è interessati alla rilevazione e misurazione di uno specifico analita, ma può diventare un pregio quando si adotti la strategia di utilizzare sensori polifunzionali organizzati in matrice. È questo il caso dei sistemi sensoriali artificiali (olfatto e gusto) nei quali si sfrutta, come negli equivalenti biologici, il principio della risposta combinatoria per il riconoscimento di odori e sapori.
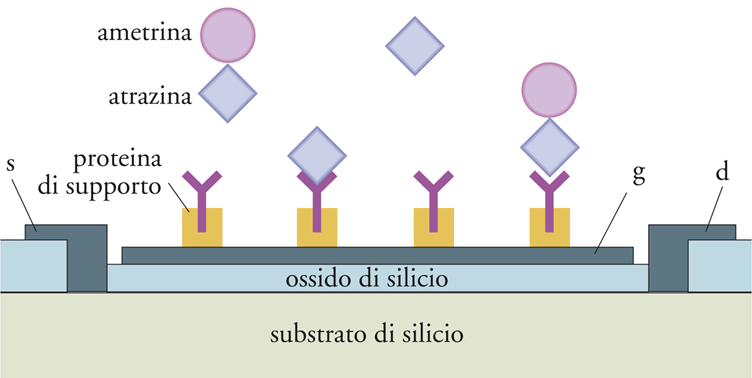
Lo sviluppo dei biosensori è invece consistito nell’impiego di biomolecole di sempre maggiore complessità. I primi modelli sono stati realizzati sfruttando l’azione di un enzima per convertire con grande efficienza la specie voluta in un prodotto di reazione di più facile misura. Il sensore di glucosio, per esempio, è basato sulla misura del consumo di ossigeno dovuto all’azione dell’enzima glucosio ossidasi sulle molecole di glucosio. Di maggiore complessità sono gli immunosensori, nei quali si sfrutta il principio dell’interazione anticorpo-antigene. Tale tecnica è ampiamente utilizzata in diagnostica medica per determinare la presenza di anticorpi nel sangue (per es., il metodo ELISA). Queste metodiche possono essere trasferite su sensori a stato solido, come illustrato dall’esempio relativo alla rivelazione dell’atrazina, uno dei più diffusi pesticidi, che si ritrova come inquinante di falde acquifere. In questo sensore (fig. 1) si utilizza, come trasduttore, un dispositivo a effetto di campo tipo MOSFET. Sul gate del MOSFET, durante il processo di fabbricazione del sensore, viene depositato uno strato di proteine che hanno il compito di tenere agganciato uno strato di molecole di antiatrazina. La corrente che scorre tra i contatti di source e drain del MOSFET viene modificata dalla presenza di una certa quantità di carica che viene depositata, durante il processo di adsorbimento, nell’area di gate. Durante il processo di adsorbimento dell’atrazina, reso selettivo dalla presenza dell’antiatrazina, viene depositata sul gate una quantità di carica che può subire un processo di amplificazione per la presenza dell’ametrina. La variazione della corrente tra source e drain, facilmente misurabile, può essere messa infine in relazione funzionale con la concentrazione di atrazina, presente nell’ambiente di misura.
Di complessità ancora maggiore sono gli studi mirati a sfruttare le proprietà sensibili del DNA per misure di specie chimiche ma anche per la rivelazione di geni indicatori, patologie o di manipolazione genetica di alimenti. Tali studi sono trainati dal grande sviluppo avuto negli ultimi anni dai DNA chip, sistemi lab-on-chip che consentono di eseguire test genici in tempi rapidi e con spesa contenuta. Infine sono da menzionare gli studi relativi alla possibilità di sfruttare le capacità sensoriali delle cellule attraverso ibridi artificiale-naturale di grande fascino ma ancora a uno stadio di sviluppo embrionale.
Negli ultimi anni la tecnologia dei sensori si è arricchita ulteriormente grazie alle recenti acquisizioni nel campo delle nanotecnologie della chimica combinatoriale e supramolecolare. Nel settore delle nanotecnologie sono da menzionare, per esempio, le proprietà dei nanotubi di carbonio. Si tratta di strutture quasi monodimensionali dotate di proprietà che risultano modulabili da parametri anbientali come la radiazione infrarossa, la deformazione meccanica e l’interazione con gas quali il biossido di azoto e l’ammoniaca. Come esempio del loro uso si possono citare i nanotransistor MOSFET, basati su singoli nanotubi che costituiscono il primo caso di sensore chimico di dimensioni nanometriche.
I recenti sviluppi della chimica, d’altro canto, consentono di assemblare dei recettori artificiali ingegnerizzati per la rivelazione di alcune classi di molecole. A tal proposito si possono menzionare i cavitandi (strutture chimiche a forma di gabbia ottimizzata per inglobare composti dotati di particolare proprietà steriche) e le metalloporfirine, che vengono utilizzate come elementi di base per la costruzione di recettori artificiali complessi in grado tra l’altro di distinguere le forme chirali di un composto. Nella fig. 2 è mostrata l’interazione tra un cavitando e una molecola di metanolo. La molecola di metanolo si lega a esso tramite un legame idrogeno (evidenziato dalla linea tratteggiata) mentre la cavità genera un effetto di selezione sterico, limitando l’interazione solo agli alcoli di minore ingombro.
Molti di questi recettori artificiali rivelano l’avvenuta interazione (processo che prende il nome di riconoscimento molecolare) attraverso la modifica delle loro proprietà ottiche come il colore o la fluorescenza. Di conseguenza è molto importante lo sviluppo di sensori chimici basati sull’accoppiamento tra recettori artificiali e sistemi optoelettronici. A tale riguardo è importante menzionare che recentemente è stata dimostrata la possibilità di realizzare sistemi analitici sfruttando le proprietà ottiche di apparecchiature come scanner digitali e fotocamere. Si tratta di strumentazione realizzata per il mercato di consumo e diffusa capillarmente tra la popolazione, inclusa addirittura nei computer o nei telefoni cellulari di uso quotidiano. Questi studi aprono la prospettiva della realizzazione di sistemi sensoriali ubiqui e distribuiti nonché in continua connessione tra loro utilizzabili, per esempio, al fine di un controllo puntuale e costante dell’ambiente.