geometria differenziale
geometria differenziale
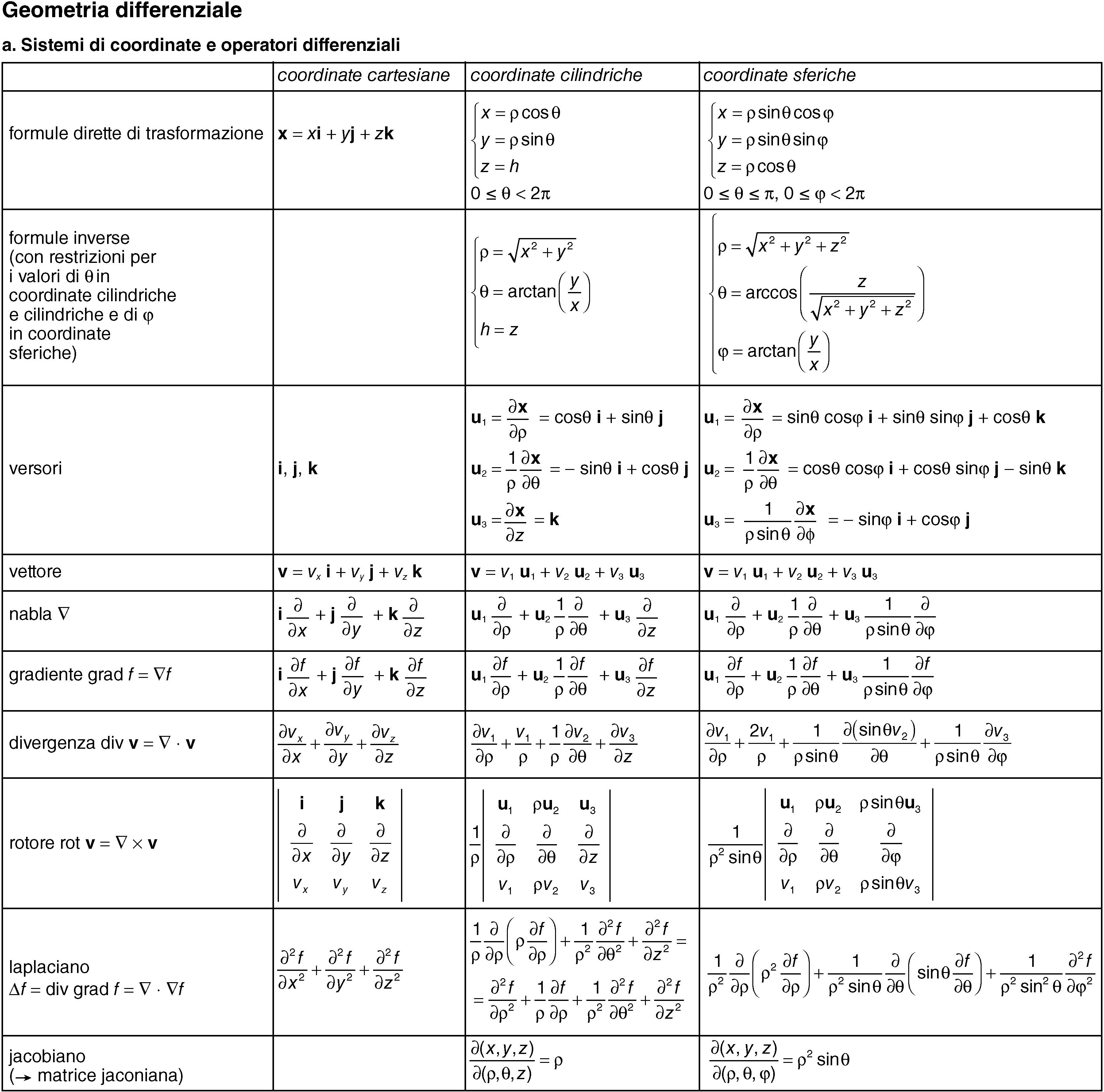
geometria differenziale settore della geometria che studia le proprietà di curvatura degli enti geometrici, in particolare nelle vicinanze di un punto (geometria differenziale locale, o in piccolo), e il modo in cui le proprietà locali possono connettersi per dar luogo a proprietà complessive dell’ente medesimo (geometria differenziale globale, o in grande). Rientrano nell’ambito della geometria differenziale lo studio delle curve e delle superfici con i metodi del calcolo differenziale e integrale classico (→ analisi infinitesimale), lo studio delle proprietà intrinseche (ossia indipendenti dallo spazio ambiente) degli enti geometrici, fondato sull’utilizzazione del calcolo tensoriale (→ tensore), che modifica gli usuali procedimenti differenziali in modo da renderli indipendenti dal sistema di variabili usato, e più in generale lo studio delle varietà differenziali (→ varietà).
Nata nel xvii secolo, grazie all’introduzione del concetto di → derivata, che risolveva il problema geometrico di determinare la tangente a una curva in un punto e quello cinematico di calcolare la velocità istantanea di un corpo, la geometria differenziale ha via via ampliato i suoi concetti e il suo campo di indagine. Dalla nozione di raggio di curvatura dovuta a G. Monge, in un suo scritto del 1771, ai metodi per determinare la curvatura e la torsione di una curva dovuti ad A.-L. Cauchy, nel suo scritto del 1826 Leçons sur les applications du calcul infinitésimal à la géométrie (Lezioni sulle applicazioni del calcolo infinitesimale alla geometria), la geometria differenziale diventa una branca autonoma di studio con il testo di C.F. Gauss Disquisitiones generales circa superficies curvas (Disquisizioni generali sulle superfici curve, 1828) in cui i risultati precedenti sono integrati in una nuova visione e si utilizza, fra l’altro, una rappresentazione parametrica delle superfici. Un contributo decisivo per una definizione matematicamente soddisfacente di curve e di superfici venne poi data da B. Riemann con l’introduzione della nozione di Mannigfaltigkeit a n dimensioni (tradotto poi con il termine varietà), nella dissertazione Über die Hypothesen, welche der Geometrie zu Grunde liegen (Sulle ipotesi che stanno alla base della geometria) del 1854, ma pubblicato postumo nel 1867. Con Riemann, l’oggetto geometrico di studio non è più necessariamente inserito in uno spazio, cioè in un ambiente che lo contiene, quale per esempio R3. Se ne possono così studiare le proprietà intrinseche, indipendentemente dal sistema di variabili utilizzato; importante, in questo contesto è il concetto di tensore, che permette di studiare la curvatura di varietà differenziabili (→ varietà topologica; → diffeomorfismo).
L’essenza dei metodi della geometria differenziale, anche nel suo periodo classico (sec. xix), consiste nello studiare curve e superfici attraverso le loro rette e piani tangenti, che sono concetti intrinseci agli oggetti stessi e non dipendono dalle proprietà complessive dello spazio in cui sono inserite.
Una curva in R3, per esempio, può essere definita da equazioni parametriche del tipo

o, più sinteticamente, da una funzione ƒ :I → R3, in cui I = (a, b) è un intervallo aperto. Se tale funzione è differenziabile (di classe C ∞), la sua derivata rappresenta, in ogni punto, il vettore tangente della curva stessa. Se in ogni suo punto, il vettore tangente non è nullo, la curva è detta regolare. In tale caso si può considerare la lunghezza di un arco della curva
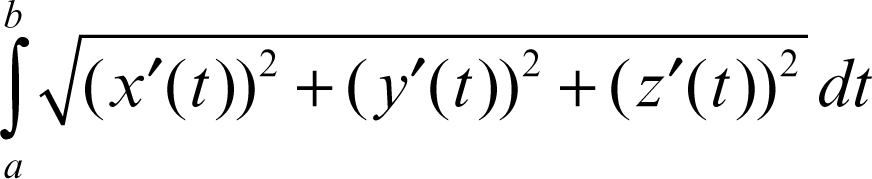
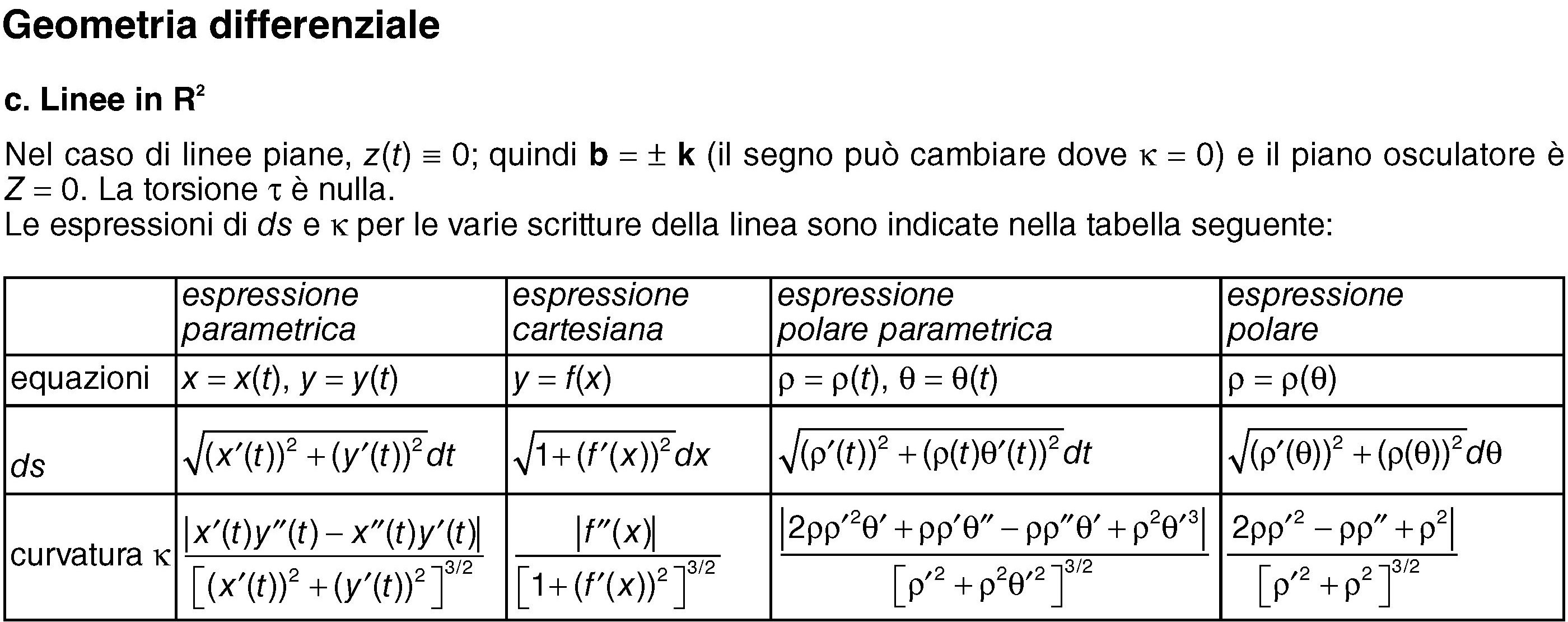
dove x ′ (t ), y′ (t ), z′ (t ) sono le derivate delle corrispondenti equazioni parametriche. Con una opportuna trasformazione del parametro, la curva regolare può essere resa tale che in ogni punto la norma del vettore tangente sia uguale a 1: in tale caso la curva è rappresentata parametricamente mediante l’ascissa curvilinea, x = ψ(s) e il vettore tangente t è più propriamente detto versore tangente. Sono poi nozioni proprie della geometria differenziale il concetto di curvatura ĸ in un punto x0 = ψ(s0), dato dalla derivata del versore tangente, e di raggio di curvatura R (che, se ĸ non è nullo, è il suo reciproco). La derivata del versore tangente è un vettore perpendicolare al versore tangente; proporzionando tale vettore è possibile definire un vettore unitario n, detto versore normale. Il piano individuato da t e n definisce in ogni punto il piano osculatore.
A partire dai versori tangente e normale si definisce il versore binormale b = t × n (in cui × indica il prodotto vettoriale), unitario e perpendicolare al piano osculatore. I tre versori t, n, b, se la curva non ha un flesso nel punto s0, costituiscono la terna intrinseca relativa a tale punto s0 e le rispettive derivate sono legate tra loro dalle formule di → Frenet, che riassumono le proprietà locali di una curva. Infine, la norma della derivata del versore binormale, che risulta parallelo a n, è detta torsione assoluta della curva stessa e indica di quanto essa si discosta dall’andamento piano.
Per quanto riguarda lo studio delle superfici, la porzione di superficie e la superficie si definiscono in modo analogo a quanto fatto per l’arco di curva e la curva. In particolare, la superficie è data come una funzione definita in un insieme E del piano a valori in R3 e la sua rappresentazione parametrica richiede perciò due parametri:
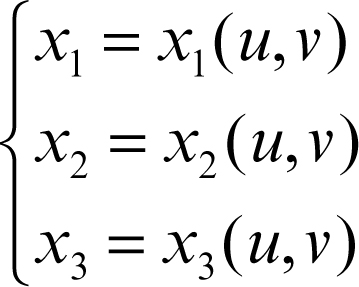
Anche in questo caso, si pongono delle condizioni di differenziabilità delle funzioni xi in modo che si abbia una superficie regolare. Le funzioni xi(u, v) devono essere di classe C ∞ e inoltre la matrice jacobiana
deve avere ovunque rango 2. Si sviluppa così una teoria delle superfici in modo analogo a quanto fatto per le curve, considerando quindi tangenti, normali e lunghezza di un arco sulla superficie. Molti altri concetti si possono tuttavia introdurre. Innanzitutto si possono definire delle coordinate curvilinee in questo modo: si considerano due rette di equazione u = u0 e v = v0 dell’insieme base E che si intersecano nel punto O(u0, v0) e le loro immagini, che sono curve regolari, determinate sulla superficie da tali coordinate. Come nel caso delle curve, i concetti elaborati in geometria differenziale per le superfici ne descrivono proprietà intrinseche, che non dipendono cioè dalla sua immersione in uno spazio ambiente. Lo studio di tali proprietà ha fornito le idee guida per la fondazione della geometria riemanniana (usata nella relatività generale in quanto il calcolo tensoriale, principale strumento per le ricerche sulle varietà riemanniane, permetteva di dare in modo naturale una formalizzazione delle leggi fisiche rispetto a qualunque riferimento dello spazio-tempo, mentre per contro lo stesso spazio-tempo permetteva di ridurre lo studio dei fenomeni gravitazionali allo studio geometrico di una varietà riemanniana) e per i più moderni indirizzi di geometria differenziale che studiano le varietà integrando metodi topologici e metodi differenziali. Si vedano le tavole delle formule di geometria differenziale.