
lidar
Radar ottico (dall’ingl. light detection and raging) che utilizza un fascio laser anziché un fascio di microonde. In senso stretto è un apparato che individua un bersaglio e ne determina la distanza per mezzo di un raggio di luce. Con il termine l. si indicano però apparati di telerilevamento basati sull’uso di sorgenti laser, mentre nel caso della sola individuazione e misurazione della distanza si preferisce usare l’espressione telemetro laser.
Anche se il termine era usato in precedenza, la nascita del l. è una diretta conseguenza dello sviluppo dei laser a impulsi giganti (1962). Poiché il l. utilizza radiazione di lunghezza d’onda molto minore delle microonde impiegate nei radar e fasci di apertura angolare usualmente molto più ridotta dei fasci di microonde, consente mappature con risoluzione spaziale migliore dei radar. Inoltre è più sensibile a variazioni di composizione chimica e dei parametri fisici del bersaglio e del mezzo attraversato. Il l. trova applicazione in fisica dell’atmosfera (nello studio delle nubi, degli aerosol, dello smog ecc.), in oceanografia e (soprattutto come telemetro) in geodesia.
Funzionamento
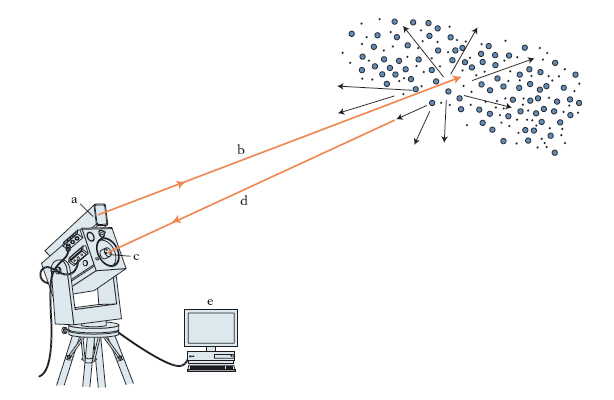
Lo schema di un lidar è illustrato in fig.: un laser illumina il bersaglio che, attraverso vari meccanismi di interazione fra radiazione e materia, riemette radiazione sia sulla stessa lunghezza d’onda del laser (λ0) sia su lunghezze d’onda diverse (λi); tale radiazione è rivelata e analizzata per ottenere informazioni sul bersaglio stesso. Il segnale, opportunamente elaborato, fornisce informazioni sia sul mezzo di propagazione sia sul bersaglio. Vengono realizzati sia l. (detti monostatici) con asse ottico parallelo all’asse del fascio laser sia l. (bistatici) con i due assi che formano un angolo sensibile. I l. possono operare sia con sorgente pulsata sia con sorgente impulsata. In questo secondo caso il l. dà luogo a un segnale risolto in distanza e permette quindi una rappresentazione del fenomeno in esame lungo il cammino di propagazione. Poiché, inoltre, il fascio laser ha un’apertura angolare limitata, è possibile, varian;do la direzione di puntamento del laser, ottenere una mappa tridimensionale del fenomeno in coordinate polari.
Tipi di lidar
Nei primo tipo di lidar realizzato, tuttora ampiamente usato per lo studio dell’atmosfera, il ricevitore analizza solo radiazione della stessa lunghezza d’onda di quella inviata dal laser. Si prende in considerazione solo la diffusione elastica (da cui il nome di l. a diffusione elastica) da parte del bersaglio e il segnale fornisce solo informazioni sul coefficiente di retrodiffusione del bersaglio. Tramite opportuni algoritmi è comunque possibile ricavare l’andamento del coefficiente di estinzione della radiazione in funzione della distanza e quindi rilevare mappe della densità di nebbie, nubi, polveri e fumi. Questo stesso tipo di l. è usato per la batimetria dei bassi fondali; lo spessore dell’acqua viene determinato misurando la distanza temporale fra l’eco dell’interfaccia aria-acqua e l’eco dal fondo. Si impiegano, ovviamente, laser operanti sulle lunghezze d’onda di massima penetrazione nell’acqua (luce blu-verde). Per avere informazioni sulla composizione del bersaglio si devono adattare al telerilevamento le tecniche della spettroscopia laser (➔ spettroscopia).
Se si utilizzano laser con lunghezza d’onda fissa si ricorre alla spettroscopia Raman laser e di fluorescenza, che non richiedono lunghezza d’onda d’eccitazione ben determinate. Per misure atmosferiche queste tecniche sono poco usate, per la debolezza dei segnali; vengono così impiegate solo per determinazione di profili di temperatura (ottenuti dall’allargamento della riga Raman della miscela attraversata). Spettroscopia Raman e di fluorescenza rivestono invece grande importanza nel telerilevamento delle acque e della vegetazione. Infatti il segnale Raman in acqua limpida è intenso e teoricamente costante; le sue variazioni vengono utilizzate per rilevare profili di torbidità e presenza di film superficiali di cui può essere misurato lo spessore. La spettroscopia di fluorescenza permette il telerilevamento dell’inquinamento delle acque da parte di idrocarburi e varie altre sostanze e la mappatura del fitoplancton attraverso la fluorescenza della clorofilla e di altri pigmenti in esso contenuti. Il telerilevamento della fluorescenza eccitata dal laser nella clorofilla consente inoltre di ottenere informazioni sulla vegetazione e sulle sue alterazioni.
Con laser accordabili in lunghezza d’onda (quali i laser a colorante e i laser a CO2) si realizzano l. che, utilizzando la sola diffusione elastica (che dà luogo a segnali di ritorno elevati), possono effettuare un’analisi della composizione dell’atmosfera. Si tratta dei l. ad assorbimento differenziale che utilizzano due diverse lunghezze d’onda molto vicine fra loro, una centrata su una riga di assorbimento del gas da rilevare e l’altra al di fuori della riga stessa. Nell’ipotesi che la diffusione elastica da parte dell’atmosfera sia uguale alle due lunghezze d’onda, la differenza di segnale è attribuibile all’assorbimento da parte del gas, e da essa si può risalire alla concentrazione del gas medesimo, noto che sia il suo coefficiente di assorbimento. È così possibile realizzare mappe di distribuzione di componenti minori dell’atmosfera e di inquinanti. Con uno schema simile, nel l. a riflettanza differenziale si utilizzano due lunghezze d’onda diverse per identificare le caratteristiche del bersaglio sulla base della variazione della riflettanza spettrale al variare della lunghezza d’onda. Questo tipo di l. è utilizzato per il telerilevamento di specie geologiche superficiali.