
GPS
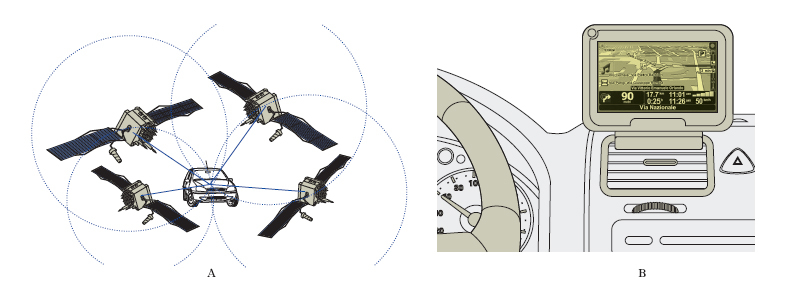
Sigla di global positioning system, sistema per la determinazione delle tre coordinate geocentriche relative alla posizione di ogni punto posto sulla superficie terrestre o al di sopra di essa (fig. 1). Nell’impiego più generale il GPS consente la misurazione, oltre che della posizione, anche della velocità del ricevitore relativa alla Terra, attraverso la determinazione dell’effetto Doppler sui radiosegnali. In tale impiego il GPS diviene una delle componenti del GNSS (global navigation satellite system) e costituisce il più avanzato sistema di radionavigazione disponibile per le navi, gli aeromobili e ogni altro veicolo in moto.
La rete dei satelliti
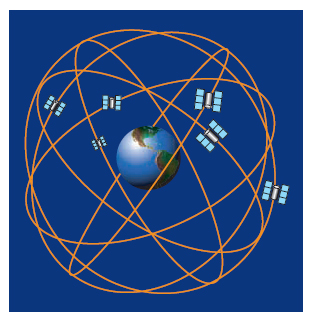
Il GPS è nato dall’esigenza delle forze armate statunitensi di operare in ogni angolo del mondo in tempi rapidi. I precedenti sistemi di localizzazione e radionavigazione richiedevano la presenza di stazioni trasmittenti dislocate a terra e quindi soggette alla sovranità dei singoli paesi ospiti. Per questo motivo venne progettato un sistema basato su radiosegnali emessi da satelliti artificiali in orbita terrestre, che coprissero l’intero globo con continuità spazio-temporale. In ogni momento, in ogni parte del globo, doveva essere possibile ricevere una quantità di radiosegnali sufficiente a determinare la posizione del punto in cui fosse posto un ricevitore per segnali GPS. Il risultato finale delle ricerche e dell’attuazione del progetto GPS ha portato alla creazione di una costellazione di 24 satelliti orbitanti intorno alla Terra lungo sei distinti piani orbitali inclinati di 55° rispetto all’asse polare, ciascuno dei quali interseca l’equatore ogni 60° di longitudine (fig. 2). I satelliti sono posti su un’orbita di raggio di circa 26.600 km intorno alla Terra in modo da avere un periodo di rivoluzione di 11 ore e 58 minuti. La costellazione dei satelliti è configurata in maniera tale che, in ogni luogo del mondo, un minimo di quattro satelliti sia di 5° al di sopra dell’orizzonte locale. In alcune condizioni sono contemporaneamente visibili da un qualunque punto della superficie terrestre fino a 8 satelliti.
Descrizione tecnica
Per la descrizione tecnica del sistema GPS occorre distinguere: gli apparati satellitari; il canale trasmissivo; i ricevitori di terra.
Gli apparati satellitari. -
Ogni satellite trasmette un segnale su due portanti, di cui la principale è chiamata L1 (di frequenza 1575,42 MHz), la secondaria L2 (di frequenza 1227,60 MHz). Tali frequenze sono ottenute a partire da una frequenza di base, prodotta da orologi atomici al cesio e/o al rubidio, pari a 10,29999999545 MHz. Le portanti sono modulate con codici a spettro espanso di tipo pseudocasuale (PRN, pseudo-random noise). Tutti i satelliti trasmettono le stesse due frequenze portanti, ma i segnali non interferiscono tra loro in modo significativo a causa delle proprietà dei codici PRN, per cui codici di satelliti diversi hanno una bassa correlazione reciproca: la tecnica di accesso multiplo è quindi del tipo a divisione di codice (CDMA, code-division multiple access). La frequenza nominale ha a terra un valore di 10,23 MHz e, analogamente, i suoi multipli L1 e L2 sono a terra 154 e 120 volte 10,23 MHz. I codici vengono combinati con i dati utilizzando un OR esclusivo (➔ XOR) e, in seguito, un modulatore, in fase e quadratura sul canale L1 e solo in fase sul canale L2, combina la portante con i dati per la successiva trasmissione. Il segnale così composto viene emesso dall’antenna del satellite.
Il canale trasmissivo. -
Il segnale, considerando un ricevitore posto sulla Terra, durante il suo cammino attraversa l’atmosfera terrestre e in particolare due regioni di questa, ionosfera e troposfera, che influenzano in parte i parametri di propagazione. La ionosfera (relativa a un’altitudine compresa fra 75 e 500 km) influisce principalmente in due modi sul segnale GPS. Un primo effetto è una combinazione di ritardo di gruppo e avanzamento di fase sulla portante, che sono entrambi dipendenti dal cammino percorso dall’onda. Un secondo effetto è dato dalle scintillazioni, che causano rapide fluttuazioni dell’ampiezza e della fase del segnale. La troposfera (compresa fra i 12 e i 20 km d’altitudine) ha un indice di rifrazione che varia con l’altitudine: esso è leggermente maggiore dell’unità, quindi causa di un ritardo di gruppo nel segnale. La regione troposferica, a differenza di quella ionosferica, non è ionizzata e non è dispersiva, ovvero il ritardo di gruppo non dipende dalla frequenza dell’onda che l’attraversa. Per giungere fino al ricevitore, il segnale può compiere vari cammini, di cui il principale è in genere in linea di vista con l’emettitore (LOS, line of sight). I cammini secondari sono formati dalla stessa onda che, dopo varie riflessioni, arriva al ricevitore con un’attenuazione e uno sfasamento variabili rispetto alla portante principale. Questo fenomeno, detto multipath, genera una interferenza nell’antenna ricevente, dovuta alla sovrapposizione incoerente dei differenti contributi di ampiezza e fase di ogni cammino. In alcuni casi ciò può comportare l’impossibilità di recuperare il segnale originario.
I ricevitori di terra. -
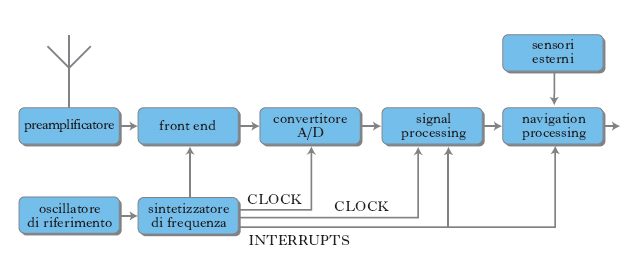
Per espletare i servizi di navigazione richiesti dall’utente, il ricevitore di un sistema di navigazione satellitare GPS deve recuperare le informazioni contenute nel segnale emesso dal satellite. Uno schema di principio di un ricevitore è mostrato in fig. 3. Il segnale, dopo essere stato captato dall’antenna, passa per un eventuale amplificatore a basso livello di rumore e viene poi convertito in banda base e campionato. I campioni del segnale vengono inviati a una serie di blocchi funzionali in cui è ottenuta la sincronizzazione del segnale originario in frequenza, fase e codice. Si parla di ricevitore a n canali essendo n il numero di segnali elaborati in parallelo e provenienti da satelliti diversi. I segnali vengono elaborati numericamente fino a generare un vettore di valori di pseudodistanze (uno per satellite). Tali pseudodistanze non sono le reali distanze satellite-utente a causa del disallineamento del clock dell’utente, nonché dei vari contributi di errore. Risolvendo le equazioni di navigazione si ricavano i parametri cinematici dell’utente; il navigation processing, che in genere è implementato con un filtro di Kalman, effettua la stima della posizione dell’utilizzatore e l’eventuale conversione del vettore di posizione in un differente sistema di coordinate più adatto alla visualizzazione finale.
Prestazioni del sistema GPS
Poiché il sistema GPS è nato per scopi militari, occorre distinguere gli utenti civili, per i quali il servizio è più precisamente denominato SPS (standard positioning service), da quelli autorizzati dal ministero della Difesa degli Stati Uniti, per i quali il servizio è denominato PPS (precision positioning service). La versione originale del sistema GPS comportava un’accuratezza per gli utenti SPS di 100 m in orizzontale, 300 m in verticale, non oltre 2 m/s in velocità e 340 ns in tempo, contro i rispettivi 22 m, 27,7 m, 0,2 m/s e 200 ns per gli utenti PPS. La degradazione delle prestazioni per il servizio SPS era dovuta principalmente a interventi appositi e a disponibilità selettiva (selective availability) intenzionale introdotta, dal ministero della Difesa degli Stati Uniti, rispetto agli utenti PPS. I segnali GPS non sono più degradati intenzionalmente a partire dal maggio 2000 (data della rimozione della selective availability), a meno di eventi eccezionali. Una maggiore accuratezza, associata a una migliore disponibilità e integrità del sistema, si traduce in una richiesta di segnali aggiuntivi.
Applicazioni del sistema GPS
Il GPS ha numerosi impieghi e lo si utilizza ogni volta si debba determinare, con la precisione consentita, la posizione e la velocità di un corpo nello spazio atmosferico. Le navigazioni aerea e marittima sono i settori di maggior impiego del GPS: con questo sistema ogni nave o aereo conosce la propria posizione e velocità. Per l’aviazione è stato dato l’avvio alla realizzazione di un sistema, connesso al GPS, per l’atterraggio anche in aeroporti privi di ogni assistenza a terra: grazie al GPS sarà quindi possibile atterrare senza l’ausilio di infrastrutture aeroportuali. Saranno dunque i paesi in via di sviluppo a trarne un grande vantaggio economico, evitando di affrontare ingenti spese infrastrutturali. Anche il traffico automobilistico beneficia del GPS grazie alla possibilità offerta dal sistema di mostrare la posizione del veicolo sovrapposta a cartine topografiche; perfino in caso di furto è possibile conoscere la posizione dell’auto.
Le scienze della Terra fanno grande uso del sistema di localizzazione per le ricerche geotopografiche o tettoniche. In meteorologia, in particolare, il GPS è impiegato per la determinazione dei venti atmosferici dal suolo sino a 30 km di altezza, utilizzando palloni sonda con ricevitore. Il GPS è utilizzato anche in biologia per lo studio delle migrazioni delle specie sia volatili sia terrestri.