
regressione
Geologia
Lo spostamento verso il mare della linea di costa. Questo fenomeno (opposto a quello della trasgressione) può verificarsi durante condizioni di stazionarietà o di sollevamento relativo del livello marino, se vi è un eccesso di apporto sedimentario; in questi casi la r. è definita deposizionale ed è anche chiamata progradazione. Se invece la r. avviene a causa di un abbassamento relativo del livello marino che provoca bruschi spostamenti della linea di costa verso il mare, associati a estesi fenomeni di erosione subaerea, è definita r. erosiva.
Linguistica
Figura retorica, detta anche epanodo (➔).
Psicologia
In psichiatria, l’orientamento o la strutturazione dei processi psichici secondo schemi funzionali propri di un’attività meno differenziata di quella normale. La legge di r. (o legge di reversione di T. Ribot) è l’ordine secondo cui nell’indebolimento generale della memoria si perdono i ricordi, che è inverso a quello della loro acquisizione: scompaiono dapprima quelli recenti e poi quelli più antichi.
In psicanalisi, ritorno a stadi precedenti rispetto all’oggetto, allo sviluppo della libido o a quello dell’io. Il concetto di r. è stato inizialmente proposto da S. Freud nell’interpretazione dei sogni, in un triplice senso: r. topica, nel senso dello schema dell’apparato psichico (conscio, preconscio, inconscio); r. temporale, nel senso di un ritorno a formazioni psichiche più antiche; r. formale, nel senso che modi di espressione più arcaici vengono sostituiti a quelli abituali.
Statistica
R. filiale Legge dell’eredità stabilita da F. Galton, secondo cui i figli tenderebbero a variare nello stesso senso dei genitori, ma con intensità minore: i figli di coppie la cui statura sia superiore al valore medio della popolazione sono anch’essi più alti ma il loro scarto medio dalla media è minore di quello dei genitori; i figli tendono dunque a regredire verso la media.
La teoria della r., che prese le mosse dagli studi di Galton sull’ereditarietà, fornisce il metodo per analizzare l’influenza che una o più variabili esercitano su altre. Per illustrare i concetti fondamentali della teoria della r. è sufficiente riferirsi al caso più semplice: quello di un collettivo di n unità statistiche classificate secondo le modalità di due caratteri quantitativi Y, X (per es., peso e statura, oppure età e reddito individuale). Siano yi e xj le modalità rispettivamente di Y e X (i = 1, 2, …, h; j = 1, 2, …, k), nij il numero delle unità in cui si osservano insieme le modalità yi e xj, e ni0 = ni1+ … +nik, n0j = n1j+ … + nhj il numero complessivo delle unità in cui si osservano rispettivamente le modalità yi e xj. I dati possono essere scritti nella seguente tabella a doppia entrata (tabella di correlazione):
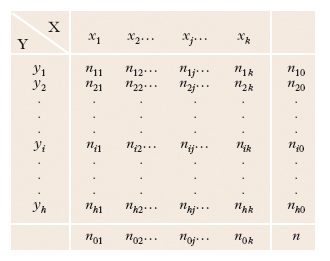
Per ogni j è individuata una distribuzione parziale del carattere Y, comprendente n0j unità, di cui n1j uguali a y1, n2j uguali a y2, e così via. Si indichi con ȳj la media aritmetica di tale distribuzione, pari a
Graficamente, se si riporta una distribuzione doppia in un piano cartesiano, si ottiene una nuvola di punti. L’insieme dei punti (xi, ȳi) viene denominato linea di r.; tale linea può essere interpolata con una retta di equazione y=β0+β1x. Seguendo il metodo dei minimi quadrati, si determinano i parametri β0 e β1 in modo da minimizzare la quantità
Si dimostra facilmente che ciò equivale a minimizzare la quantità
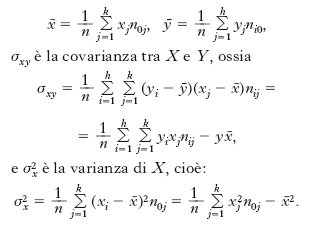
In altri termini, se si applica il metodo dei minimi quadrati, la retta che interpola la linea di r. è la stessa che interpola tutta la distribuzione. Annullando le derivate parziali della funzione minimanda rispetto a β0 e β1 si trova β1=σxy/σ2x, β0=ȳ−β1x̄, dove x̄ e ȳ sono le medie aritmetiche delle distribuzioni marginali di X e Y:
Come risulta dall’espressione dei parametri β0 e β1, la retta di r. passa per il punto (x̄, ȳ). Si verifica inoltre facilmente che la somma dei ‘residui’ yj−β0−β1xj (ossia delle differenze fra i valori effettivamente osservati e quelli teorici costituiti dalle ordinate della retta di r. nei punti di ascissa xj) moltiplicati per le corrispondenti frequenze nij è nulla. Mentre β0 dipende dalla scelta dell’origine e si annulla per effetto di una traslazione che porti l’origine nel punto (x, ȳ), β1, che viene denominato coefficiente di r. di Y su X, è indipendente dall’origine, ma varia al variare delle unità di misura. Il coefficiente di r. è la tangente trigonometrica dell’angolo che la retta di r. forma col verso positivo dell’asse X e indica pertanto di quanto vari approssimativamente in media Y quando X subisce un incremento unitario. L’approssimazione, naturalmente, è tanto migliore quanto più la linea di r. si avvicina a una retta. Quando β1 = 0, le variabili X e Y si dicono incorrelate. Variabili che sono indipendenti sono anche incorrelate, ma non è vero il viceversa. Vi sono perfino casi di dipendenza funzionale con coefficiente di r. nullo: un esempio semplice è y = x2, con X distribuita simmetricamente intorno allo zero.
I concetti esposti si estendono facilmente a variabili continue e al caso di più variabili. Quando l’approssimazione fornita dalla retta di r. non è soddisfacente, conviene interpolare la linea di r. con polinomi di grado superiore o con altre funzioni di r., i cui parametri vengono sempre determinati, quando possibile, con il metodo dei minimi quadrati. Accanto alla retta di r. di Y su X può essere considerata quella di X su Y, di equazione:
La media geometrica dei due coefficienti di r. presa col loro segno comune è il coefficiente di correlazione r di Bravais-Pearson:
L’analisi della regressione consiste nella trattazione di un modello probabilistico del tipo:
(i = 1, 2, …, n), dove yi sono determinazioni campionarie della variabile dipendente Y, xij (j = 1, 2, …, k) sono i valori noti, assunti in concomitanza dalle variabili Xj, valori che generalmente vengono trattati come costanti, βj (j = 0, 1, …, k) sono i parametri o coefficienti di r., di valore incognito e le εi rappresentano gli errori di osservazione, che in generale si postulano indipendenti e distribuiti secondo la legge normale con media nulla e varianza σ2, che è del pari incognita. In forma matriciale si può scrivere più sinteticamente: y = xβ+ε, dove y è il vettore che ha per componenti y1, y2, …, yn, ossia le osservazioni della variabile Y, x è la matrice
mentre β ed ε sono i vettori di componenti β0, β1, …, βk e, rispettivamente, ε0, ε1, …, εk. Le stime βˆ0, βˆ1, …, βˆk dei parametri β0, β1, …, βk, ottenute col metodo dei minimi quadrati che impone di minimizzare la forma quadratica (y−X βˆ)T (y−X βˆ), sono date, se la matrice XTX è regolare, da βˆ = (XTX)–1 XTy, dove βˆ è il vettore di componenti βˆ0, βˆ1, …, βˆk, e T indica la matrice trasposta. Date le ipotesi fatte, βˆ è un vettore di variabili casuali, distribuite normalmente con medie uguali a β e con la matrice delle varianze e covarianze uguale a σ2 (XTX)–1. La costante incognita σ2, a sua volta, può essere stimata correttamente mediante la quantità
La variabile (n−k−1)/s2 è distribuita secondo la legge del χ2 con (n−k−1) gradi di libertà ed è indipendente dalle variabili βˆ. Fondandosi su queste proprietà, l’analisi della r. si propone di pervenire a induzioni riguardanti i veri valori dei parametri βˆ, mediante intervalli di confidenza e test di significatività.