
equazione
Matematica
Definizioni
Si chiama e. un’uguaglianza tra due espressioni contenenti una o più variabili ovvero una o più funzioni o anche enti di natura più generale ( incognite dell’e.); se essa è soddisfatta, qualunque sia la determinazione delle variabili o delle funzioni o degli enti che sono presenti nelle espressioni, si dice e. identica (o identità); in caso contrario si ha a che fare con un’e. in senso proprio, e allora ogni scelta degli elementi incogniti che rendono soddisfatta l’uguaglianza si dice una soluzione dell’e. (mentre non tutte le scelte sono soluzioni). Per es., x2−a2=(x−a)(x+a) è un’identità; x2+2a2=3ax è un’e. ed è soddisfatta se x=a ovvero x=2a.
A seconda del tipo delle espressioni che compaiono nell’e., questa assume nomi e proprietà diverse (algebrica, differenziale, integrale ecc.). Due e. si chiamano equivalenti quando ciascuna di esse è conseguenza dell’altra; due e. equivalenti ammettono perciò le stesse soluzioni. Per es., x2+12=7x e (x−3)(x−4)=0 sono due e. equivalenti perché dalla prima segue la seconda e dalla seconda la prima. Non sono equivalenti x2=a2 e x=a perché dalla seconda segue la prima, ma non viceversa.
E. algebriche
Generalità. Un’e. si dice algebrica se è ottenuta uguagliando a zero un polinomio in una o più variabili; l’e. si dice rispettivamente in una o più incognite; grado dell’e. è il grado del polinomio. Il caso più semplice è quello dell’e. in una sola incognita x:
![[1]](https://images.treccani.it/ext-tool/intra/images/a/a9/FORMULE_equazione_01.jpg)
ove a0 ≠0 e le ak sono numeri reali o complessi (o più in generale appartenenti a un campo numerico). Si dice radice o soluzione dell’e. un valore α dell’incognita che la renda soddisfatta, tale cioè che
![[2]](https://images.treccani.it/ext-tool/intra/images/b/b8/FORMULE_equazione_02.jpg)
Accade allora che il polinomio
![[3]](https://images.treccani.it/ext-tool/intra/images/b/b3/FORMULE_equazione_03.jpg)
sia divisibile per x−α; se inoltre è divisibile per (x−α)s, ma non per (x−a)s+1, il numero s (≥1) si dice la molteplicità della radice α, e si parla di radice s-pla. Se ci si pone nel campo dei numeri complessi vale il teorema fondamentale dell’algebra: ogni e. algebrica ammette almeno una radice; di esso è corollario immediato il teorema (chiamato spesso con lo stesso nome): ogni e. algebrica di grado n, non identica, ammette n radici (che potranno essere reali o complesse), nel senso che la somma delle molteplicità delle radici distinte è n.
Per le e. algebriche valgono numerosissime proprietà quali: le radici sono funzioni (algebriche) continue dei coefficienti; le funzioni simmetriche delle radici sono funzioni razionali dei coefficienti ecc. Ricordiamo inoltre il teorema di Ruffini-Abel: le e. algebriche di grado inferiore a 5 sono risolubili per radicali, quelle di grado 5 o superiore non lo sono se i coefficienti sono generici. L’espressione ‘risolubile per radicali’ significa che i valori delle soluzioni si possono costruire a partire da quelli dei coefficienti eseguendo solo un numero finito di operazioni razionali e di estrazioni di radice (di indice intero). La condizione necessaria e sufficiente perché un’e. algebrica sia risolubile per radicali fu scoperta da E. Galois.
Passando ora a considerare un’e. algebrica, in una incognita, a coefficienti reali, si ha che se essa ammette radici complesse, queste sono a coppie complesse coniugate (quindi un’e. a coefficienti reali, di grado dispari, ha sempre almeno una radice reale); inoltre vale la seguente regola di Cartesio: in un’e. a radici tutte reali, il numero delle variazioni (di segno) nella successione dei coefficienti è uguale al numero delle radici positive (tenuto conto della loro molteplicità); lo stesso può affermarsi delle permanenze di segno e delle radici negative. Per es., nell’e. di 2° grado x2+4 x−1=0, con coefficienti +1, +4, −1 si presentano una permanenza e una variazione: per la regola di Cartesio si può asserire che le due radici (in questo caso di necessità reali perché il discriminante è positivo) saranno una positiva e una negativa.
Per un’e. in più incognite si definirà, analogamente, soluzione ogni insieme ordinato di valori delle incognite che soddisfano l’e. stessa; soluzione di un sistema di più e. sarà una soluzione comune a tutte le e. del sistema ecc. (➔ sistema).
Per la storia delle e. algebriche, che in gran parte si identifica con la storia dell’algebra in senso classico ➔ algebra.
E. binomia. E. di grado n, del tipo axn = b. Essa è risolubile per radicali: le sue soluzioni si ottengono moltiplicando una radice n-esima di b/a per le radici n-esime del numero 1.
E. cubica (o di 3° grado). E. del tipo ax3+bx2+cx+d=0. Se a, b, c, d sono reali, essa ammette almeno una radice reale. Mediante la sostituzione x=y−b/(3a), la si riduce all’e. y3+py+q=0; la formula risolutiva è allora
![[4]](https://images.treccani.it/ext-tool/intra/images/c/c5/FORMULE_equazione_04.jpg)
nota con il nome di formula di Cardano (dovuta a S. Dal Ferro, G. Cardano e N. Tartaglia), dove le quantità sotto le radici cubiche sono le soluzioni dell’e. z2+qz−p3/27=0 ( e. risolvente di Hudde), e i valori delle due radici cubiche vanno scelti in modo che il loro prodotto sia uguale a −p/3; indicando con u una delle radici di
![[5]](https://images.treccani.it/ext-tool/intra/images/8/87/FORMULE_equazione_05.jpg)
e ponendo v=−p/3u, detta ϕ una radice cubica complessa di 1, per es., ϕ=−1/2+i√‾‾‾‾‾3/2, le soluzioni dell’e. in y sono: y1=u+v; y2=ϕu+ϕ2v; y3=ϕ2u+ϕv. La quantità q2/4+p3/27 è il ‘discriminante’ Δ dell’e.: se a, b, c, d (e quindi p e q) sono reali, per Δ>0 si hanno una radice reale e due complesse coniugate, per Δ=0 tre radici reali, di cui due coincidenti, per Δ〈0 tre radici reali e distinte. Esistono altre formule risolutive, valide anche per la prima delle e. scritte.
E. diofantea. Si parla di e. diofantea con riferimento a un’e. algebrica, in una o più incognite, a coefficienti generalmente interi, quando di essa si ricerchino soltanto le (eventuali) soluzioni intere. Tra le e. diofantee ricordiamo in particolare l’ e. pitagorica, che è l’e. x2+y2=z2 della quale si chiedono le soluzioni intere. Le terne di numeri soddisfacenti a una tale e. (3, 4, 5; 6, 8, 10; 5, 12, 13; ecc.) si dicono pitagoriche. Il nome è dovuto al fatto che per il teorema di Pitagora, la soluzione di una tale e. equivale alla ricerca dei triangoli rettangoli i cui lati abbiano lunghezze espresse da numeri interi. La soluzione generale dell’e. pitagorica è x=k a b, y=1/2 k(a 2−b2), z=1/2 k(a2+b2), con k intero arbitrario e a e b (a>b) interi positivi dispari primi tra loro.
E. lineare (o di 1° grado). E. del tipo ax+by+cz+...+k=0. L’e. di primo grado a una incognita ax+b=0 (con a≠0) ha per radice x=−b/a.
E. omogenea. Si chiama omogenea un’e. algebrica in più variabili in cui i termini hanno tutti lo stesso grado: il primo membro dell’e. è cioè un polinomio omogeneo. Un’e. omogenea ammette sempre infinite soluzioni; infatti da ogni soluzione se ne ottengono infinite altre, alterandole per un fattore di proporzionalità. Per es., l’equazione x2−5 x y+6 y2=0 ammette le soluzioni x=2 k, y=k, e x=3 h, y=h con h, k numeri complessi qualsiasi.
E. quadratica (o di 2° grado). In una sola incognita è del tipo ax2+bx+c=0 con a≠0. Le sue radici x1, x2 sono date dalla formula risolutiva
![[6]](https://images.treccani.it/ext-tool/intra/images/b/b9/FORMULE_equazione_06.jpg)
se i coefficienti a, b, c sono reali, esse risultano reali e distinte, reali e coincidenti o complesse coniugate a seconda che sia positivo, nullo o negativo il discriminante Δ=b2−4 a c.
E. quartica (o di 4° grado). E. del tipo ax4+bx3+cx2+dx+e=0. L. Ferrari fu il primo a sviluppare una tecnica algebrica per la sua soluzione, che venne poi pubblicata nella Ars Magna di G. Cardano (1545). Mediante la sostituzione x=y−b/(4a), la si riduce all’e. y4+py2+qy+r=0, le cui soluzioni sono
![[7]](https://images.treccani.it/ext-tool/intra/images/e/ef/FORMULE_equazione_07.jpg)
dove z1, z2, z3 sono soluzioni dell’e. z3+2pz2+(p2−4r) z−q2=0, detta risolvente cubico, e i segni delle radici devono essere scelti in modo tale che √‾‾‾z1 √‾‾‾z2 √‾‾‾z3=−q. Questa soluzione è detta di Cartesio-Eulero.
E. trinomia (o biquadratica). E. algebrica del tipo:
![[8]](https://images.treccani.it/ext-tool/intra/images/2/26/FORMULE_equazione_08.jpg)
la sua soluzione, effettuabile per radicali, dipende dalla soluzione dell’e. di 2° grado az2+bz+c=0, e delle due e. binomie xn=z1, xn=z2, essendo z1, z2 le radici dell’e. precedente.
3. E. differenziali
3.1 Generalità. Un’ e. differenziale è un legame tra una o più funzioni incognite e una o più delle loro derivate (parziali, se le variabili indipendenti sono più di una). A seconda che tale legame sia espresso in forma algebrica, lineare, analitica ecc., si parla di e. differenziale algebrica, lineare, analitica ecc. L’e. differenziale si dice ordinaria se si tratta di funzioni di una sola variabile indipendente, alle derivate parziali se le variabili sono più di una; ordine dell’e. è l’ordine più elevato delle derivate che in essa compaiono. Una soluzione di un’e. differenziale, cioè una funzione che insieme con le sue derivate renda soddisfatta l’e. (identicamente rispetto alle variabili), si dice un integrale: da ciò il fatto che, in luogo di dire che si risolve l’e., si dice spesso che la si integra.
La risoluzione di un’e. differenziale è in genere un problema molto complesso che solo in casi particolari si può fare per quadrature, cioè riconducendosi all’ordinaria integrazione delle funzioni. In generale, poiché non si conoscono dei metodi di risoluzione validi in tutti i casi, si ricorre a procedimenti che variano da un tipo di e. a un altro. In passato si è fatto ricorso a procedimenti grafici o numerici (generalmente eseguiti anch’essi per via grafica) e in seguito a calcolatrici analogiche; successivamente, la disponibilità e la flessibilità di elaboratori elettronici di tipo digitale ha consentito l’uso, quasi esclusivo, di metodi di tipo numerico, quali per es., procedi;menti di integrazione per serie o procedimenti che permettono la sostituzione delle e. differenziali con sistemi di e. algebriche (➔ numerico, calcolo), alle differenze finite, agli elementi finiti ecc.
La teoria delle e. differenziali negli ultimi anni del 20° sec. si è accresciuta di un maggior numero di applicazioni in tutti i campi delle scienze naturali. Fenomeni di diffusione e di dispersione hanno suggerito nuovi problemi alle condizioni iniziali, mentre la fisica dei sistemi stazionari ha portato alla formulazione di nuovi problemi con condizioni al contorno. Nella ricerca delle soluzioni delle e. differenziali e nello studio della loro unicità si sono avuti notevoli progressi anche grazie allo sviluppo delle tecniche numeriche e delle potenze di calcolo degli elaboratori elettronici. Innumerevoli applicazioni delle e. differenziali iperboliche come modello di propagazione di onde sono state realizzate nella teoria dell’elasticità, in sismologia, in fluidodinamica ecc. Un fattore ricorrente nella ricerca attuale è la non linearità delle e. differenziali, dovuta alla complessità dei fenomeni che si vogliono descrivere, come, per es., le turbolenze, le onde d’urto, i cambiamenti di fase. La presenza della non linearità ha condotto a una struttura più complessa e più ricca della teoria delle e. differenziali e allo sviluppo di metodi nuovi. Lo studio delle e. d’evoluzione del tipo ut=K(u), dove K è un operatore differenziale non lineare, analizzabili con tecniche spettrali (basate su trasformazioni integrali) in due dimensioni spaziali, ha visto notevoli sviluppi a partire dalla fine degli anni 1980, mentre la teoria a dimensioni maggiori di due è ancora da elaborare.
Nella teoria delle biforcazioni sono stati di grande importanza per l’analisi globale strumenti come la teoria del grado topologico, mentre in alcuni studi (di R. Teman, P. Constantin) si sono discussi metodi nuovi per stimare la dimensione di Hausdorff-Besikovich (➔ dimensione) degli attrattori. H. Amann ha sviluppato una teoria dei semigruppi analitici per dimostrare esistenza e unicità di soluzioni di sistemi non lineari parabolici. G. Da Prato e P. Grisvard hanno sviluppato una teoria basata sul concetto di regolarità massimale che utilizza stime a priori. Strumento importante per la dimostrazione dell’unicità della soluzione è la condizione dell’entropia . R. Jensen ha dimostrato l’unicità per una certa classe di soluzioni, dette di viscosità, di e. differenziali alle derivate parziali del secondo ordine di tipo molto generale. La teoria della regolarità ha condotto alla formulazione di problemi di frontiera libera in cui si deve determinare la posizione della frontiera, a priori incognita, tra l’insieme in cui la soluzione è positiva e quello in cui è nulla.
3.2 E. differenziali ordinarie. In generale, la soluzione di un’ e. differenziale ordinaria di ordine n dipende da n costanti arbitrarie (per es., i valori della funzione e delle sue derivate fino alla (n−1)-ma in un punto fissato). Integrale generale di un’e. è una famiglia di soluzioni che dipendono da n parametri; assegnando un valore particolare a tali parametri si ottengono gli integrali particolari dell’equazione. Non sempre, però, l’integrale generale di un’e. ne fornisce tutti gli integrali, potendo esistere altri integrali, detti singolari, non ottenibili tramite l’integrale generale (➔ anche integrale). Si devono ad A.-L. Cauchy alcuni fondamentali teoremi che assicurano, sotto opportune condizioni, l’esistenza e l’unicità della soluzione per un’e. o per un sistema di e. differenziali. In particolare prende il nome di problema di Cauchy , il problema di determinare la soluzione del sistema di e. del primo ordine
![[9]](https://images.treccani.it/ext-tool/intra/images/3/32/FORMULE_equazione_09.jpg)
con le condizioni iniziali
![[10]](https://images.treccani.it/ext-tool/intra/images/9/90/FORMULE_equazione_10.jpg)
Per tale problema si dimostra che se f=(f1,…,fn) è continua e se, dati un intorno I di x0 e un intorno J di (y10,…,yn0), esiste una costante L tale che
![[11]](https://images.treccani.it/ext-tool/intra/images/8/8b/FORMULE_equazione_11.jpg)
per ogni s∈I e v,w∈J, allora in I la soluzione esiste ed è unica. È opportuno notare che un sistema in cui compaiono derivate di ordine superiore si può sempre ricondurre a un sistema del primo ordine introducendo delle incognite ausiliarie. Per es. l’e. y″+y=g(x), si può scrivere come y′=v, v′=–y+g(x). Un altro tipo di problema molto comune è quello di risolvere un’e. in un intervallo con condizioni al contorno assegnate, cioè imponendo alla soluzione e/o alle sue derivate di assumere ben determinati valori agli estremi dell’intervallo; anche in questo caso esistono teoremi che garantiscono, sotto opportune ipotesi, l’unicità della soluzione.
Diamo di seguito alcuni cenni sui metodi di risoluzione di alcuni tipi di e. differenziali ordinarie E. lineare del 1° ordine
![[12]](https://images.treccani.it/ext-tool/intra/images/d/d9/FORMULE_equazione_12.jpg)
Se Q (x) = 0 l’e. si dice omogenea ed è a variabili separabili. Altrimenti, il suo integrale generale è
![[13]](https://images.treccani.it/ext-tool/intra/images/1/15/FORMULE_equazione_13.jpg)
con c costante arbitraria. E. lineare a coefficienti costanti
![[14]](https://images.treccani.it/ext-tool/intra/images/7/75/FORMULE_equazione_14.jpg)
con ak numeri reali assegnati. Se f(x) =0 l’e. è detta omogenea e la sua soluzione generale può essere costruita a partire dalle radici del polinomio caratteristico
![[15]](https://images.treccani.it/ext-tool/intra/images/1/19/FORMULE_equazione_15.jpg)
associando a ogni radice λ, di molteplicità r, le r soluzioni eλx, x eλx , …, xr−1eλx. Nel caso di radici complesse si noti che se λ=a+ib è soluzione di P(λ)=0 allora anche λ̅=a−ib lo è, e quindi alle due radici, entrambe di molteplicità r, si possono associare le 2r soluzioni reali eaxsin (bx), eaxcos (bx), x eax sin (bx), x eaxcos (bx), …, x r−1 eax sin (bx), x r−1 eax cos (bx). Indicando con yk(x) (k=1,…,n) le n soluzioni così trovate, la soluzione generale dell’e. omogenea risulta y(x)= ∑k=1n ckyk(x), dove ck sono costanti arbitrarie. La soluzione generale dell’e. completa può essere infine ottenuta come somma di una qualsiasi soluzione particolare e dell’integrale generale del problema omogeneo. E. del 1° ordine a variabili separabili
![[16]](https://images.treccani.it/ext-tool/intra/images/e/e3/FORMULE_equazione_16.jpg)
essa ha l’integrale generale
![[17]](https://images.treccani.it/ext-tool/intra/images/5/52/FORMULE_equazione_17.jpg)
il quale definisce in modo implicito l’integrale y=y (x, c); c è una costante arbitraria. E. di Bernoulli E. differenziale lineare del 1° ordine del tipo:
![[18]](https://images.treccani.it/ext-tool/intra/images/4/44/FORMULE_equazione_18.jpg)
Mediante la sostituzione z (x)=[y (x)]−n+1 essa diventa lineare. E. di Clairaut E. del tipo:
![[19]](https://images.treccani.it/ext-tool/intra/images/1/1e/FORMULE_equazione_19.jpg)
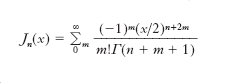
Posto y′=t, e indicata con f′(t) la derivata rispetto al proprio argomento della funzione f(t), l’integrale generale è y=cx+f(c), con c costante arbitraria; si ha inoltre un integrale singolare espresso, a mezzo dei parametri, da x=−f′(t), y=−tf′(t)+f(t). La curva da esso rappresentata è l’inviluppo della famiglia di rette rappresentata dall’integrale generale. E. di Bessel E. differenziale lineare, del 2° ordine, del tipo:
![[20]](https://images.treccani.it/ext-tool/intra/images/7/79/FORMULE_equazione_20.jpg)
in cui n è una costante, in generale complessa; essa interviene in importanti e classici problemi di fisica matematica. Sono integrali dell’e. di Bessel le cosiddette funzioni di Bessel di prima specie, esprimibili mediante serie del tipo:
[
]]
(in cui Γ è la funzione gamma); la natura e le proprietà dell’integrale generale dipendono però in modo essenziale da n, in particolare dal fatto che n sia o no un intero.
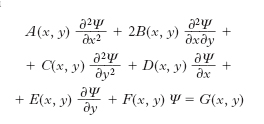
3.3 E. differenziali alle derivate parziali. Ben più complessa è la natura delle e. differenziali alle derivate parziali. Mentre le e. differenziali ordinarie, implicando funzioni di una sola variabile, schematizzano fenomeni dipendenti, per così dire, da una sola causa, le e. alle derivate parziali, in cui entrano funzioni di più variabili, permettono di descrivere analiticamente fenomeni dipendenti da più cause simultanee. Circa il loro comportamento, dal punto di vista analitico, diciamo soltanto che l’integrale generale di un’e. alle derivate parziali dipende non già da costanti, ma da funzioni arbitrarie (in numero di n, se n è l’ordine dell’e.); per ottenere un determinato integrale dell’e. occorre dunque scegliere dette funzioni o direttamente o assegnando opportune condizioni al contorno. Le condizioni al contorno più usate sono quelle di Dirichlet (la soluzione ha un valore assegnato sul contorno), quelle di Neumann (la componente del gradiente normale al contorno è assegnata sul contorno stesso) e quelle di Cauchy (sia la soluzione che la componente normale del gradiente sono assegnate sul contorno). Come esempio consideriamo le e. lineari del 2° ordine in due variabili, che descrivono il comportamento di numerosi sistemi fisici:
[
]]
E. di questo tipo sono classificate in e. iperboliche, paraboliche, ellittiche a seconda che l’e. di 2° grado Aλ2+2Bλ+C=0 abbia radici reali e distinte, coincidenti oppure complesse. Per risolvere le e. ellittiche vengono di solito impiegate le condizioni di Dirichlet, mentre le condizioni di Cauchy, dette anche condizioni iniziali, sono adatte a e. paraboliche e iperboliche in cui compare come variabile il tempo t e il contorno ha equazione t=0. L’ordinaria e. delle corde
vibranti, ∂2Ψ−−−−∂t2 − ∂2Ψ−−−−∂x2 =0, è di tipo iper-
bolico; l’e. di Laplace, ∂2Ψ−−−−∂x2 − ∂2Ψ−−−−∂y2 =0, è di
tipo ellittico; l’e. del calore, ∂Ψ−−−−∂t − ∂2Ψ−−−−∂x2 =0,
è di tipo parabolico. 3.4 E. differenziali stocastiche. Sono e. differenziali in cui l’evoluzione della funzione incognita è determinata, oltre che, come di consueto, da un campo vettoriale deterministico, anche da un termine stocastico. In generale, dunque, un’e. differenziale stocastica ha la forma:
![[23]](https://images.treccani.it/ext-tool/intra/images/0/09/FORMULE_equazione_23.jpg)
dove υ(q(t),t) è il campo vettoriale deterministico, detto anche campo di trascinamento, o drift, e dω(t) è il differenziale stocastico di un processo di Wiener-Gauss (➔ stocastico). Un’e. differenziale stocastica della forma scritta può essere discretizzata come
![[24]](https://images.treccani.it/ext-tool/intra/images/2/23/FORMULE_equazione_24.jpg)
dove Δω(t) è una variabile gaussiana indipendente da q(ti) e avente media nulla e varianza Δt=ti+1−ti. Ovviamente un’e. differenziale, o alle differenze finite, di questo tipo, non ha un’unica soluzione deterministica: per risolvere un’e. differenziale stocastica occorre specificare la distribuzione del processo stocastico soluzione dell’equazione stessa. Sono state sviluppate molte tecniche, analitiche e numeriche, per lo studio delle soluzioni delle e. differenziali stocastiche, principalmente attraverso l’uso dell’integrazione sui cammini (➔ cammino).
Lo studio delle e. differenziali stocastiche costituisce un campo di ricerca sottoposto a crescente attenzione, perché di grande interesse applicativo: in fisica, tali equazioni sono lo strumento adatto per descrivere l’evoluzione di un qualunque sistema in cui siano presenti disturbi aleatori e sono alla base della meccanica stocastica, che sembra essere una promettente formulazione alternativa alla meccanica quantistica; in biologia, sono applicate allo studio dell’evoluzione delle popolazioni, come pure a quello delle traiettorie delle molecole biologiche immerse in un liquido; in economia, sono lo strumento per descrivere l’evoluzione dei prezzi dei prodotti finanziari.
E. funzionali
Sono e. in cui le incognite non sono numeri, ma funzioni; e. funzionali sono perciò le e. differenziali, ma nel successivo sviluppo dell’analisi e delle sue applicazioni si è più spesso riservato il nome di e. funzionale a equazioni non riducibili a e. differenziali.
E. alle differenze finite. E. di tipo funzionale esprimente una relazione tra gli incrementi finiti di una o più funzioni incognite e certe funzioni note: per es., f(x+Δx)−f(x)=2Δx. La teoria di tale tipo di e. ha molti punti di contatto con quella delle e. differenziali.
E. integrali. Sono e. aventi come incognita una funzione, la quale compare sotto il segno di integrazione. Se la funzione incognita compare soltanto sotto il segno di integrazione, l’e. integrale è detta di 1ª specie, in caso contrario essa è detta di 2ª specie. Si chiama poi e. integrale di Fredholm un’e. nella quale i limiti dell’integrale siano costanti, ed e. integrale di Volterra un’e. in cui un limite sia costante e uno variabile. Ciò è illustrato dal seguente schema:
In esso ϕ(x) è la funzione incognita mentre f(x) e K(x, y) sono assegnate. Quest’ultima si chiama il nucleo dell’e. integrale.
E. integro-differenziali. Sono e. nelle quali le funzioni incognite compaiono sia sotto il segno di integrazione sia sotto segni di derivazione. Si incontrano, per es., nello studio dei fenomeni detti ereditari, cioè dipendenti non solo dallo stato attuale dell’ente e da eventuali condizioni iniziali, ma da tutti gli stati precedenti, e nell’analisi dei circuiti elettrici.
E. trascendenti
Un’e. si dice trascendente quando non è algebrica, cioè quando si ottiene uguagliando a zero una funzione della variabile (o delle variabili, a seconda che si tratti di un’e. in una o più incognite) che non si riduce a un polinomio. E. trascendenti sono, per es., le e. esponenziali, nelle quali l’incognita compare all’esponente, e le e. trigonometriche, nelle quali l’incognita compare nell’argomento di funzioni trigonometriche.
Astronomia
Il termine e. oltre al significato proprio della matematica, ha in astronomia anche quello di ‘correzione’ o ‘quantità che bisogna aggiungere o togliere’. E. della luce Correzione che bisogna apportare all’istante dell’osservazione della posizione del Sole (o di un pianeta o di una cometa) per tenere conto del tempo che la luce impiega per giungere da questo astro all’osservatore. Nel caso del Sole l’e. della luce è di 498,38 s, tempo impiegato dalla luce a percorrere la distanza media Sole-Terra. E. solare Nome dato, nella correzione gregoriana del calendario, alla soppressione dell’anno bisestile negli anni secolari non multipli di 400. Grande e. solare La soppressione dei 10 giorni (passando dalla data 4 ottobre 1582 alla data 15 ottobre), per riportare l’equinozio di primavera al 21 marzo (➔ calendario). E. del tempo Differenza fra tempo solare vero e tempo solare medio (➔ tempo).
Chimica
Indica l’insieme delle notazioni utilizzate per descrivere una reazione chimica. Esprime il principio di conservazione della materia attraverso la molecole, gli atomi e gli ioni che prendono parte alla reazione stessa. Analogamente a quelle matematiche, le e. chimiche sono composte da due membri: in uno (a sinistra) compaiono i reagenti e nell’altro (a destra) i prodotti. Tra i due membri è posto il segno di uguaglianza o, meglio, una freccia che indica il verso in cui decorre la reazione. Nel caso si tratti di una reazione reversibile si usano due frecce sovrapposte dirette in senso opposto. Così, per es.,
![[25]](https://images.treccani.it/ext-tool/intra/images/8/84/FORMULE_equazione_25.jpg)
indica che dalla reazione fra soda (2 moli) e acido solforico (1 mole) si formano solfato di sodio (1 mole) e acqua (2 moli). Nelle e. si indicano spesso anche le quantità di calore messe in gioco nella reazione: il segno della tonalità termica è positivo o negativo a seconda che la reazione avvenga con sviluppo o con assorbimento di calore; si può anche adottare la convenzione opposta secondo cui si indicano con il segno negativo le tonalità termiche delle reazioni esotermiche. Nella reazione precedente, presa come esempio, si adotta la convenzione egoistica e, pertanto, l’e. indica che per mole di acido solforico che reagisce si sviluppano 131.500 joule. I coefficienti rappresentano i rapporti tra le moli; per tale motivo, ha senso anche l’uso di coefficienti non interi; per es.:
![[26]](https://images.treccani.it/ext-tool/intra/images/1/1c/FORMULE_equazione_26.jpg)
Tramite i rapporti tra le moli è possibile risalire ai rapporti tra le masse in una reazione chimica. Il termine e. è giustificato dal fatto che, per il principio di conservazione, il numero di atomi di ogni specie deve essere lo stesso all’inizio e al termine di una reazione. Per le e. ioniche si deve tenere conto anche del principio di elettroneutralità per il quale il numero complessivo di cariche dei reagenti deve essere uguale a quello dei prodotti.
Per quanto riguarda le e. di stato ➔ gas.
Economia
E. di diverso tipo (algebriche, differenziali, integrali, trascendenti ecc.) vengono usate nei modelli in cui sovente si esprime il ragionamento economico. Gli econometrici chiamano e. strutturali le relazioni economiche formulate per elaborare un modello, cioè le e. di comportamento, che descrivono il comportamento del consumatore, del produttore ecc., le e. tecniche, esprimenti le relazioni fisiche tra fattori impiegati e prodotti ottenuti, e le identità, esprimenti relazioni contabili necessarie o relazioni deducibili direttamente dalla definizione di una o più grandezze economiche. E. degli scambi (o teoria quantitativa della moneta di Fisher) è detta la formula MV=PQ (in cui M è la quantità di moneta in circolazione, V la velocità di circolazione della stessa, P il livello generale dei prezzi e Q la quantità dei beni e servizi scambiati). Tale e. costituisce una mera identità contabile (indicativa dell’insieme di mezzi monetari necessari per provvedere a una data spesa) sin quando non si introducano delle ipotesi, le quali consisto;no nella costanza delle transazioni (T), dato che esse corrispondono al livello di scambi di pieno impiego e nella costanza della velocità di circolazione (V), dato che in essa si riflettono le abitudini monetarie della collettività considerata. Posta la costanza di questi due elementi, ne risulta come necessaria la dipendenza del livello generale dei prezzi dalla quantità della moneta, che costituisce l’essenza ultima delle teorie di tipo quantitativo. Quella indicata di Fisher, pur essendo la più nota, è infatti una versione particolare delle e. quantitative. Altra formulazione è legata alla scuola di Cambridge e assume, nella forma più generale, la relazione M=KPT, nella quale le transazioni (T) sono sempre riferite al livello di pieno impiego e K indica le ‘scorte monetarie’ detenute dal pubblico, secondo criteri consuetudinari, tali da giustificare la sua considerazione come una costante, sin quando queste consuetudini non si modifichino. Sebbene nella e. di Cambridge (che subì varianti ulteriori per opera di D.H. Robertson e di J.M. Keynes) la velocità di circolazione non figuri in modo esplicito, essa è presente nella considerazione delle ‘scorte monetarie’, che sono in rapporto inverso con la velocità.
Per quanto le nozioni quantitative riassunte da queste formule siano quelle più note, in realtà la loro capacità esplicativa ha formato oggetto di acute critiche per effetto delle concezioni keynesiane che si sono svincolate dal quadro di riferimento di pieno impiego. Qualora esistano risorse disoccupate e la possibilità di combinarle in modo efficace, l’espansione dei mezzi di pagamento non conduce necessariamente all’aumento dei prezzi, ma all’incremento della produzione, almeno sin quando non si manifestano strozzature nel sistema economico. Successivamente, formulazioni del neoquantitativismo (M. Friedman, D. Patinkin), pur ricollegandosi in qualche modo alle antiche concezioni rappresentate dalle formule ricordate, ne offrono una versione più elaborata e problematica. E. della domanda internazionale Termine usato per indicare che il punto di equilibrio negli scambi tra due mercati si determina nel punto di incontro delle rispettive curve di domanda-offerta, è cioè determinato dalla comparativa intensità dei bisogni di ciascun paese e dalla specializzazione del capitale e del lavoro nelle produzioni più favorevoli e indica come ciascun mercato paghi le importazioni con le esportazioni.
Psicologia
E. personale Il complesso degli errori personali, cioè degli errori d’osservazione derivanti da peculiarità di chi esegue l’osservazione (per es., il modo di appurare la contemporaneità di due eventi, la posizione di un indice su una scala ecc.), sensibilmente sistematici per uno stesso osservatore, ma variabili largamente da osservatore a osservatore. L’espressione fu creata dall’astronomo tedesco F.W. Bessel per indicare le differenze interindividuali nella valutazione del tempo ricavata dalle osservazioni stellari.