
guida
Editoria
Libro contenente le indicazioni necessarie alla visita di un museo o complesso monumentale, di una città, di un’intera regione o Stato. Precedenti della g. come illustrazione sistematica di paesi e città e norma pratica del viaggiatore, possono essere le trattazioni geografico-storiche frequenti nel mondo greco col titolo di περιήγησις (➔ Pausania); più ancora gli itinerari del mondo romano, le descrizioni di pellegrinaggi in Terra Santa (per es. la Peregrinatio Aetheriae) e i mirabilia medievali, illustranti per i pellegrini le chiese e le rovine di Roma. Grande importanza nell’affermarsi del tipo moderno di g. ebbero i resoconti di viaggi (sempre più in voga dal 13° sec.), nonché, con l’Umanesimo, le ricerche sistematiche e descrittive delle antichità romane.
Ma l’uso della g. si diffuse al principio del 16° secolo. Numerose edizioni ebbe la Roma instaurata (1471) di Flavio Biondo, ampliata poi con l’Italia illustrata. Del 1550 è la Descrittione di tutta Italia di Leandro Alberti, e del 1600 l’Itinerarium Italiae, con piantine, di Franciscus Schottius, forse olandese. Seguono poi le g. generali d’Italia, sempre più numerose e alcune notevolissime, come quella di J. Richardson del 1722. F. Albertini (1510) scrisse su Roma e Firenze; ma di questa ultima città la g. più importante è quella di F. Bocchi (1581). Venezia fu illustrata prima da M.A. Michiel (1521-43, il manoscritto fu pubblicato solo nel 1800), e poi da M. Boschini (1664). Roma ebbe le g. di G. Mancini (1615-20 circa), F. Titi (1708), e molte altre fino a quella di A. Nibby (1838). Bologna quella di P. Lamo (1560), di G. De Zani (1583), e di C.C. Malvasia (1657).
All’estero è ricchissima dal 17° sec. la letteratura di viaggi, e non mancano vere e proprie g. (per l’Inghilterra, J. Ralph 1734; per l’Austria, Ungheria, Friuli, E. Browne 1672; per la Germania e altri paesi europei, J.G. Keyssler 1740-41). Col diffondersi del turismo, la g. si è diffusa e perfezionata utilizzando anche strumenti informatici; a g. specialistiche, come quelle dedicate all’architettura moderna, si affiancano g. meno analitiche, con illustrazioni, che mirano a suggerire un’interpretazione delle città e dei monumenti.
Fisica
G. ottiche
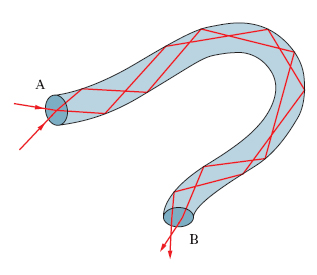
Dispositivi basati sul fenomeno della canalizzazione della luce, sul fatto, cioè, che un fascio di luce immesso a una estremità A (fig. 1) di una bacchetta non rettilinea di materiale trasparente (per es., vetro), si propaga nell’interno della bacchetta, subendo una serie di riflessioni totali sulle pareti di essa, e fuoriesce dall’altra estremità, B, con intensità poco minore di quella iniziale, anche se la bacchetta è relativamente lunga e tortuosa. La bacchetta in questione costituisce una g. di luce, che può essere utilmente sfruttata quando, per es., si debba illuminare una ristretta zona cui dia accesso un andito non rettilineo. Un tipo particolarmente interessante è la cosiddetta g. ottica a fibre (➔ fibra).
Le g. ottiche hanno trovato grande applicazione nel settore dell’ottica integrata, consentendo la realizzazione di dispositivi in cui circuiti ottici connettono i diversi componenti che interagiscono con la radiazione ottica guidata: in questo ambito vengono usate g. ottiche a film sottile, costituite da uno strato, di spessore anche minore di 1 μm, di materiale dielettrico a elevato indice di rifrazione disposto su un substrato di indice inferiore. Le operazioni di filtraggio, rigenerazione, amplificazione possono essere effettuate direttamente sul segnale ottico, senza che sia necessaria la doppia conversione da ottico a elettronico e viceversa, aumentando in tal modo la velocità di funzionamento e diminuendo il consumo di energia.
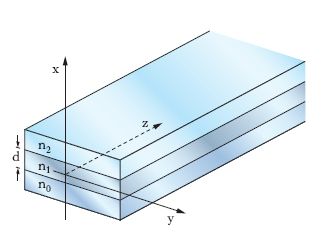
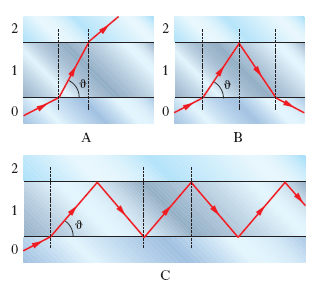
Le g. ottiche planari a indice costante (step-index), di interesse in ottica integrata, sono costituite da un sistema di tre strati piani di materiali isotropi di indici di rifrazione (fig. 2) n1>n0≥n2: se n2<n0 la g. è detta asimmetrica, mentre se n2=n0 è simmetrica. Affinché nello strato 1, di spessore d, si possa avere propagazione guidata, per es., nella direzione z, è necessario che l’angolo ϑ del raggio con tale direzione nel punto di riflessione alla parete sia minore del corrispondente angolo limite ϑli=arccos(ni/n1), con i=0, 2. Se ϑ>ϑl2>ϑl0 si ha soltanto una riflessione parziale alle superfici di separazione tra gli strati, sicché si ha una rapida attenuazione nella propagazione nello strato 1 (modi spaziali; fig. 3A); se ϑl2>ϑ>ϑl0 si hanno raggi rifratti nel substrato, con conseguente attenuazione della componente guidata (modi di substrato; fig. 3B): i modi spaziali più quelli di substrato costituiscono l’insieme dei modi di radiazione, che rappresentano perdite ai fini della propagazione guidata (modi guidati; fig. 3C) nel mezzo 1, che ha luogo solo se ϑl2>ϑl0>ϑ, mentre negli altri due mezzi si hanno onde evanescenti in prossimità delle superfici di separazione. La condizione precedente sembrerebbe indicare che per ogni valore dell’angolo ϑ che la soddisfi sia possibile la propagazione guidata. In realtà, tale tipo di propagazione si ha soltanto per un insieme discreto di valori di ϑ. Tale limitazione deriva dalla necessità che esista una congruenza di fase tra i punti appartenenti allo stesso fronte d’onda, cioè che la variazione di fase per un punto del fronte d’onda dopo due riflessioni successive sia un multiplo intero m di 2π radianti: ciò conduce alla condizione 2n1kdsenϑ−ϕ0−ϕ2=2mπ, nota come equazione di dispersione, dove ϕ0 e ϕ2 sono gli sfasamenti connessi alle riflessioni alle interfacce col substrato e il superstrato rispettivamente, mentre k=2π/λ è il modulo del vettore d’onda, con λ lunghezza d’onda.
Mentre le g. ottiche planari a indice costante sono ottenute per deposizione di film sottili su un substrato, quelle a indice variabile (graded-index) sono realizzate mediante processi di diffusione termica, che dà luogo a un gradiente trasverso ∇n dell’indice di rifrazione nella direzione x. In questo caso, non esistendo alcuna superficie di discontinuità tra mezzi con indice di rifrazione diverso, non si ha alcuna riflessione totale, risultando il processo di confinamento della radiazione nello spazio guidante dovuto soltanto alla presenza di ∇n, e quindi la soluzione del problema della propagazione del campo elettromagnetico può essere desunta solo mediante le equazioni di Maxwell.
G. d’onda
In generale si definisce g. d’onda un dispositivo capace di guidare un’onda elettromagnetica. La configurazione più utilizzata è la g. d’onda metallica chiusa, costituita da un tubo metallico riempito di materiale dielettrico (comunemente aria) nel cui interno si può propagare un’onda elettromagnetica. Poiché il campo elettromagnetico risulta confinato all’interno della g., non sono presenti fenomeni di irraggiamento dell’energia e accoppiamenti indesiderati con apparati vicini alla guida. Se in prima approssimazione si suppone che le pareti della g. siano costituite da materiale perfettamente conduttore, la distribuzione di campo nella g. è determinabile risolvendo le equazioni di Maxwell con la condizione al contorno che sia identicamente nulla la componente tangenziale del campo elettrico sulle pareti della guida. Si trovano in tal modo diverse configurazioni di campo dette modi le cui proprietà sono legate alla forma, alle dimensioni della sezione e al tipo di dielettrico utilizzato.
I modi sono denominati trasversi elettrici (TE) o trasversi magnetici (TM) a seconda che siano nulle le componenti del campo elettrico o del campo magnetico lungo l’asse della guida. Per alcuni tipi di g. si può avere anche un modo trasverso elettro-magnetico (TEM), simile al modo di propagazione di un’onda piana nello spazio libero; tale modo può però sussistere solo se all’interno della g. metallica è presente un conduttore isolato rispetto alle pareti, come avviene nel caso del cavo coassiale. Ciascun modo può essere trattato con il formalismo delle linee di trasmissione e pertanto è caratterizzato da una costante di propagazione e da una impedenza caratteristica. Per ogni modo TE o TM è anche possibile determinare una frequenza di taglio fc, tale che, lungo l’asse della g., si ha propagazione di energia per frequenze superiori a fc, mentre si ha un campo decrescente in modo esponenziale per frequenze inferiori a fc. In quest’ultimo caso il modo viene detto evanescente. La frequenza di taglio fc è uguale a zero solo nel caso del modo TEM e pertanto in tal caso la g. può essere utilizzata anche in bassa frequenza. In tutti gli altri casi, cioè per g. senza conduttore interno, l’uso è limitato per ciascun modo alle frequenze maggiori di fc; pertanto la g. si comporta in modo simile a un filtro passa-alto. Tenendo conto delle dimensioni comunemente in uso, la banda utile cade nel campo delle microonde o delle onde millimetriche. In generale si preferisce usare la g. nella banda di frequenze in cui un solo modo si può propagare mentre tutti gli altri sono evanescenti. In tale caso la propagazione è monomodale ed è vantaggiosa rispetto alla propagazione multimodale caratterizzata da interferenze indesiderate fra modi e da dispersione di energia. La propagazione monomodale si ottiene utilizzando la g. nella banda di frequenze compresa fra la frequenza di taglio del modo fondamentale e quella del primo modo superiore. L’immissione e il prelevamento di energia in una g. sono effettuati con opportuni dispositivi di eccitazione a seconda del tipo di generatore e di carico disponibili. Tali dispositivi sono simili a piccole antenne posizionate in modo da accoppiarsi prevalentemente con il modo che si vuole eccitare all’interno della guida.
Le g. d’onda ordinarie sono largamente utilizzate come elementi di collegamento a microonde o a onde millimetriche fra apparati o fra ricetrasmettitori e antenne. Sono quindi largamente presenti nelle stazioni di ponti radio o di radar.
Tecnica
La g. è un meccanismo atto a far descrivere a punti di un suo membro traiettorie prefissate; nel caso che il meccanismo sia costituito da due soli membri (coppia cinematica), g. è il membro fisso che condiziona il movimento di quello mobile. Tra le g. costituite da due soli membri sono da considerare i cuscinetti per gli alberi di una macchina (coppia rotoidale), le madreviti per le viti (coppia elicoidale), le g. propriamente dette per gli organi dotati di moto traslatorio (coppie prismatiche). Le superfici di contatto tra i membri fisso e mobile possono essere ottenute lavorando opportunamente il membro fisso, oppure riportando su di esso un pezzo apposito, che risulta essere allora la g. vera e propria.
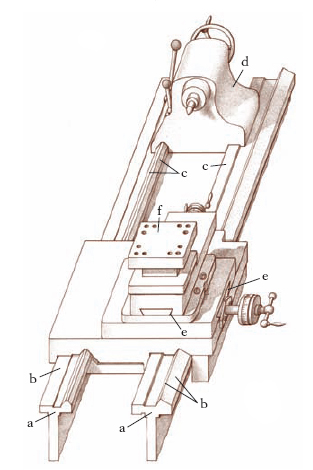
Importanti esempi di g. prismatiche si hanno nelle macchine utensili, per es. nel tornio (fig. 4), nel quale sono presenti g. piane e a V per lo scorrimento del carrello portautensili e della contropunta sul bancale, nonché g. a coda di rondine per lo spostamento della slitta trasversale sul carrello e della lista portautensili sulla slitta trasversale. La lubrificazione delle g. prismatiche avviene mediante olio che, attraverso canalini, giunge a scanalature praticate nelle superfici coniugate. Per ridurre al minimo le resistenze d’attrito si costruiscono g. a rotolamento, che si differenziano da quelle a strisciamento per l’interposizione di elementi rotolanti (sfere o rulli) fra le superfici coniugate; le g. prismatiche a rotolamento hanno una portanza inferiore a quelle a strisciamento.
Nelle g. con più di due membri, costituenti pertanto sistemi articolati, particolare importanza riveste il caso in cui le traiettorie prefissate dei punti di un membro sono rettilinee; in alcune g. tutti i membri sono fra loro accoppiati rotoidalmente e tali g. possono essere suddivise in g. approssimate del moto rettilineo, che sono in genere dei quadrilateri articolati (g. di Evans), e g. esatte del moto rettilineo, tra le quali sono particolarmente significative la g. di Hart e la g. di Peaucellier. Le g. approssimate e le g. esatte del moto rettilineo sono state per lungo tempo preferite alle g. prismatiche per le difficoltà tecnologiche connesse alla realizzazione di queste ultime, offrendo nel complesso minore attrito; ora sono utilizzate solo come g. delle punte scriventi degli strumenti registratori.
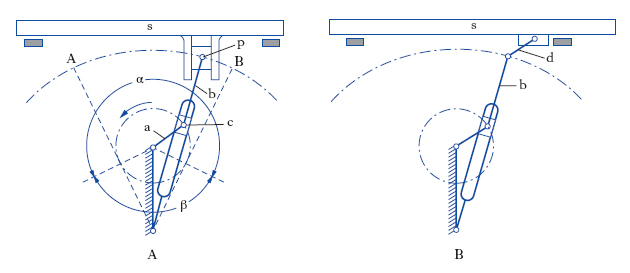
Fra le g. a più membri è da ricordare ancora la g. di Fairbairn, sistema articolato, usato, p. es., nelle limatrici, per trasformare un moto rotatorio in uno traslatorio alternato nel quale le due corse avvengono in tempi diversi. È costituita essenzialmente (fig. 5) da una manovella a e da una leva a glifo b, collegate tra di loro da un corsoio c che si accoppia rotoidalmente alla manovella e prismaticamente alla leva; supposto che la manovella sia animata da moto rotatorio uniforme, l’estremo libero della leva, essendo gli angoli α e β diversi, percorre l’arco AB più lentamente da B verso A e più rapidamente da A verso B, e lo stesso avviene per la slitta s, a esso collegata, che compie il moto traslatorio alternato. La corsa più lenta è quella di lavoro, la cui velocità è limitata dalle esigenze tecnologiche dell’operazione di taglio che si effettua, limitazione che non esiste invece per la corsa di ritorno, resa quindi più veloce con vantaggio della produttività della macchina. Poiché l’estremo della leva descrive una traiettoria circolare, esso non può essere direttamente accoppiato con la slitta, i cui punti descrivono traiettorie rettilinee; il collegamento è effettuato mediante un pattino p, imperniato sulla leva e scorrevole in una scanalatura della slitta, oppure, più comunemente, mediante una bielletta d (biscottino) imperniata sia sulla leva b, sia sulla slitta s.