
macchina
Complesso di organi collegati in modo che determinate forze applicate, dette forze motrici, compiano lavoro in vista di un determinato scopo, vincendo certe forze resistenti; il termine è quasi sempre accompagnato da una specificazione che ne precisa la natura (macchina idraulica, macchina elettrica ecc.) o, più spesso, lo scopo (macchina escavatrice, macchina agricola, macchina sollevatrice ecc.). In realtà tale definizione non è la più generale possibile. Già nell’antichità, infatti, la parola m. fu usata non solo per indicare congegni atti a produrre lavoro, per es. per sollevare carichi o esplicare sforzi, ma anche per indicare dispositivi della più varia specie, come impalcature, mezzi di difesa e di offesa bellica o strumenti di misurazione, atti a svolgere determinate funzioni non sempre implicanti un lavoro. Tale situazione si è mantenuta fino a oggi, e anzi si è complicata, per l’estrema varietà dei mezzi, qualificati come ‘macchine’, che la tecnica pone a disposizione delle attività umane: non è pertanto possibile dare una definizione di carattere generale; si può al più distinguere fra m. propriamente dette, rispondenti alla definizione iniziale, e m. in senso lato atte a svolgere una specifica funzione, non necessariamente la produzione di un lavoro, quali, per es., le m. per cucire, per scrivere, le m. calcolatrici, fotografiche, nelle quali la funzione è in genere descritta dalla qualificazione che accompagna il termine, o le m. utensili, per la lavorazione di metalli e altri materiali.
Fisica
Macchine semplici
Denominazione che si dà genericamente a dispositivi statici, capaci di equilibrare una forza (resistenza) con un’altra (potenza o, meglio, equilibrante) le cui caratteristiche (intensità, orientamento, punto di applicazione) sono generalmente differenti; a rigore non sono scomponibili in parti: per tal motivo si includono tra le m. semplici soltanto il cuneo, la leva e il piano inclinato, ma in pratica la qualifica si attribuisce anche ad altri apparecchi (le pulegge, la taglia, la vite ecc.) che, propriamente, non sono semplici. Una m. semplice è detta vantaggiosa, svantaggiosa o indifferente a seconda che la potenza riesca minore, maggiore o uguale alla resistenza; cioè a seconda che il vantaggio (rapporto tra la resistenza e la potenza) sia maggiore, minore o uguale a 1.
Tecnica
Classificazione delle macchine
Vista la grande varietà delle m. moderne, anche restando nel campo delle m. propriamente dette, sono possibili molte classificazioni di esse: per es., in base al principio di funzionamento, alla maggiore o minore complessità di struttura, in base alla natura dell’energia che le alimenta o dei mezzi impiegati. Non tutte queste classificazioni hanno peraltro carattere generale, e non tutte sono significative.
Una classificazione che invece è generale e ha un notevole significato è quella secondo la quale si considera la natura della trasformazione energia-lavoro che si attua nella macchina. Seguendo tale criterio le m. si possono suddividere in: macchine motrici, o motori, che trasformano in lavoro meccanico energia termica, energia elettrica, energia cinetica di fluidi in movimento, energia potenziale gravitazionale di liquidi, energia potenziale elastica di solidi deformati o di fluidi compressi; macchine generatrici, o generatori, che, inversamente alle precedenti, trasformano lavoro meccanico in energia elettrica (generatori elettrici), oppure in energia di fluidi in circuiti chiusi (per es., pompe o compressori per azionamento di comandi idraulici e pneumatici); va però sottolineato che le m. che trasformano lavoro in energia cinetica, di pressione, potenziale di un fluido (pompe, compressori ecc.), sono di regola classificate fra le macchine operatrici; m. operatrici, che si servono del lavoro meccanico erogato da una m. motrice per attuare le operazioni richieste dall’industria, dall’agricoltura ecc. (m. utensili, escavatrici, trasportatrici, pompe da sollevamento, compressori per serbatoi di gas in pressione; ecc.); macchine trasformatrici e trasmettitrici, che ricevono ed erogano lavoro meccanico modificando le grandezze da cui il lavoro medesimo dipende (per es., i riduttori di velocità) o trasferendo il lavoro da un luogo a un altro (per es., le cosiddette trasmissioni a cinghie, a ingranaggi ecc.).
Nelle suddette categorie di m., le trasformazioni di energia in lavoro, o di lavoro in energia, o di lavoro in lavoro non si compiono senza perdite a causa di inevitabile degradazione di parte dell’energia o del lavoro in calore per resistenze del mezzo e attriti: si dicono m. ideali le m. prive di perdite di qualsiasi natura, che costituiscono talvolta un’utile schematizzazione delle m. reali; in queste ultime, il rapporto tra l’energia (o la potenza) erogata e l’energia (o la potenza) ricevuta, sempre minore dell’unità, è il rendimento, grandezza fondamentale per valutare la qualità di una m. motrice o generatrice o operatrice o trasmettitrice. Altre grandezze di notevole importanza sono la potenza, cioè il lavoro o l’energia che la m. è in grado di fornire nell’unità di tempo, i cosiddetti parametri funzionali, che qualificano la m. in relazione al particolare scopo cui essa è destinata (così, per es., è un parametro funzionale per una m. trasportatrice la quantità di materiale che essa può trasportare nell’unità di tempo), e le caratteristiche costruttive (per es., il rapporto tra la potenza e la massa, il fatto di essere fissa oppure trasportabile oppure semovente ecc.).
Macchine elettriche
In senso generale, m. elettrica è qualsiasi m. atta a trasformare in energia elettrica energia di altra natura (generatore elettrico) o energia elettrica di altre caratteristiche (macchina convertitrice o convertitore), oppure, inversamente, atta a trasformare energia elettrica in energia di altra natura, come accade nel motore elettrico, in grado di trasformare energia elettrica in energia meccanica.
Classificazione
A seconda che in esse vi siano o no organi rotanti, le m. elettriche si dividono in rotanti (➔ generatore) e statiche. Tra le macchine elettriche statiche è di fondamentale importanza, soprattutto nel trasporto e nella distribuzione dell’energia elettrica, il trasformatore (➔) che, operando una trasformazione dei parametri della tensione e della corrente presenti al suo ingresso, si considera appartenente alla categoria delle macchine elettriche convertitrici. M. convertitrici statiche diverse dai trasformatori, realizzate utilizzando componenti elettronici di potenza a semiconduttore (transistori, diodi ecc.), non vengono in genere annoverate tra le m. elettriche ma si parla di convertitori statici a semiconduttore. L’impiego di questi dispositivi consente di ottenere la conversione della corrente alternata in corrente continua (raddrizzatori), della corrente continua in corrente alternata (inverter) oppure la variazione del livello di tensione.
La classificazione più semplice delle macchine elettriche rotanti può essere fatta in base al tipo di corrente generata o assorbita, consentendo la distinzione tra macchine a corrente continua e macchine a corrente alternata. Una classificazione più generale, invece, è quella fatta in base alle caratteristiche costruttive, che prevede varie categorie: macchine asincrone, distinte a loro volta in macchine asincrone trifase, sia motori che generatori, e macchine asincrone monofase, alle quali appartengono soltanto i generatori; macchine sincrone, di cui fanno parte i motori trifase e gli alternatori, questi ultimi sia trifase sia monofase; macchine a commutazione, alle quali appartengono i motori a corrente alternata, trifase e monofase, i motori a corrente continua, dinamo e metadinamo; macchine di conversione, utilizzate sia per la conversione della corrente alternata in corrente continua, e viceversa, sia per la conversione di frequenza. Le m. sincrone e quelle asincrone traggono la loro denominazione dall’essere o no la velocità angolare del rotore legata con rapporto invariabile al numero delle coppie polari e alla frequenza della corrente; quelle a commutazione sono così denominate perché in esse si verifica una periodica inversione dei collegamenti al circuito esterno (per le m. a corrente continua) o dei collegamenti di entrambi i circuiti, interno ed esterno, rotorico e statorico (per le m. a corrente alternata).
Principi di funzionamento delle macchine elettriche rotanti
Le m. elettriche rotanti funzionano sfruttando il fenomeno dell’induzione elettromagnetica e le azioni che si destano tra circuiti percorsi da corrente; caratteristica saliente è comunque la presenza di due circuiti, o due gruppi di circuiti, uno dei quali (induttore) genera un campo magnetico, mentre l’altro (indotto) nei generatori è sede di forze elettromotrici indotte, nei motori è percorso da correnti che determinano la coppia motrice. Induttore e indotto sono in moto relativo di rotazione: in qualche caso (per es. nelle dinamo) l’induttore è fisso, costituendo lo statore della m., e l’indotto ruota, costituendo il rotore, mentre in altri casi (per es. nelle m. a corrente alternata sincrone) accade il contrario.
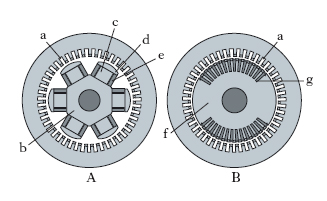
Strutturalmente gli indotti constano di un pacco di lamierini magnetici a forma di corona circolare isolati tra loro con carta o vernice e recanti scanalature cave a (fig. 1) in cui sono sistemati i conduttori, generalmente di rame, dell’avvolgimento. Quanto agli induttori, quelli eccitati da corrente continua possono essere a poli salienti o a poli lisci. L’induttore a poli salienti (detto anche ruota polare o sistema polare), usato in alcune m. a corrente alternata sincrone, consta essenzialmente (fig. 1A) di una corona di acciaio b sulla quale sono fissati radialmente i poli c in acciaio, massicci o laminati, muniti di espansioni d quasi sempre laminate; sui nuclei polari è sistemato l’avvolgimento di eccitazione e. Negli induttori a poli salienti per m. a corrente continua, i poli sono fissati direttamente alla carcassa, ossia alla struttura portante della m. elettrica. L’induttore a poli lisci è costituito (fig. 1B) da un cilindro f di acciaio massiccio recante una serie di scanalature longitudinali g entro cui viene sistemato l’avvolgimento di eccitazione. Gli induttori eccitati a corrente alternata, che costituiscono generalmente lo statore della m., sono anch’essi del tipo a poli lisci. Per assicurare la libera rotazione del rotore, tra le espansioni polari dell’induttore e dell’indotto va lasciata un’intercapedine d’aria (interferro o traferro) che a seconda delle dimensioni e del tipo della m. varia da frazioni di millimetro a qualche centimetro.
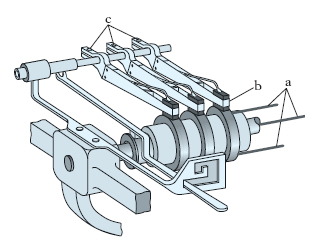
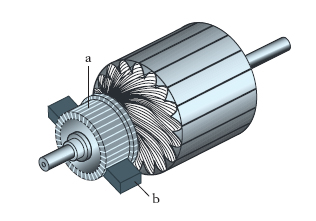
Gli avvolgimenti, sia quelli percorsi da corrente continua sia quelli percorsi da corrente alternata, sono sostanzialmente di 2 tipi: avvolgimenti concentrati, se sono costituiti da una bobina di spire infilata nell’espansione polare; avvolgimenti distribuiti, nel caso che la m. non abbia espansioni polari per cui le spire sono allogate in cave ricavate in una parte della superficie cilindrica dell’induttore. La connessione dei circuiti rotorici con un circuito esterno è diversa a seconda che gli avvolgimenti del rotore siano percorsi da corrente alternata (per es. nelle m. asincrone) oppure da corrente continua. Nel primo caso tale collegamento viene effettuato mediante un collettore ad anelli (fig. 2), cui fanno capo gli estremi a degli avvolgimenti rotorici e su cui poggia un sistema di spazzole b collegate con il circuito esterno mediante i morsetti c. Se il rotore invece è percorso da corrente continua conviene distinguere le m. a commutazione dalle m. a corrente alternata sincrone. Nelle m. a commutazione è utilizzato un dispositivo denominato collettore-commutatore (fig. 3), avente la funzione di raddrizzare la forza elettromotrice indotta negli avvolgimenti, e costituito da un sistema di lamelle di rame a isolate tra loro, delimitanti una superficie cilindrica coassiale con l’indotto sulla quale poggia una coppia di spazzole b per il collegamento con il circuito esterno. A ciascuna lamella dell’indotto fanno capo i punti di connessione tra sezioni di avvolgimento contigue. Nelle m. a corrente alternata sincrone, il collegamento viene effettuato mediante un collettore ad anelli cui fanno capo gli estremi degli avvolgimenti rotorici e sul quale sono applicate due file di spazzole collegate a un generatore di corrente continua (per es., dinamo eccitatrice, batteria di accumulatori).
Campi magnetici e forze elettromotrici indotte negli avvolgimenti
Il campo induttore nelle m. a poli eccitati con corrente continua è solidale con il sistema polare; esso risulta pertanto fisso nello spazio nel caso delle m. a corrente continua, mobile con la ruota polare nel caso delle m. sincrone. Un avvolgimento polifase percorso da un sistema polifase equilibrato di correnti alternate, di frequenza f, crea un campo magnetico, che presenta p coppie polari, rotante con una velocità angolare n=60f/p giri/min. Questo campo equivale a quello di una ruota polare avente uguale numero di coppie polari e rotante alla stessa velocità. L’induzione nell’interferro è distribuita secondo una certa legge rappresentabile con un diagramma detto curva di campo. L’andamento di questa curva è sensibilmente sinusoidale per le m. sincrone a poli salienti e per le m. a poli lisci, sincrone e asincrone, nonché per le m. a corrente alternata a commutazione. Per le m. a corrente continua invece il diagramma del campo induttore è sensibilmente costante per gran parte del passo polare e si annulla in corrispondenza delle mezzerie interpolari.
Per le m. a corrente alternata, ammessa sinusoidale la legge di variazione del flusso d’induzione magnetico concatenato con ciascuna spira, il valore efficace della forza elettromotrice indotta in un avvolgimento di fase vale
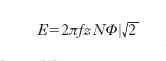
,
essendo Φ il flusso massimo che si concatena con una spira a passo diametrale e che in pratica coincide con il flusso totale che emana da un polo; N le spire in serie fra loro agli effetti della forza elettromotrice considerata; f la frequen;za; z un coefficiente, detto fattore d’avvolgimento, che tiene conto sia della differenza di fase esistente in ogni istante fra le varie spire dell’avvolgimento sia del passo di spira che può essere intero o accorciato. Per ciascuna fase di avvolgimento polifase vale la stessa espressione, e il sistema si dice simmetrico se i vettori che rappresentano le tensioni di fase hanno tutti lo stesso modulo e sono successivamente sfasati dello stesso angolo 2π/m, dove m rappresenta il numero delle fasi. Per le m. a corrente continua, si ha E=npNΦ/(60 a), essendo n la velocità angolare del rotore, in giri/min, N il numero totale dei conduttori, a il numero di coppie di rami interni in parallelo.
Perdite e rendimenti
Le principali perdite di potenza da considerare in una m. elettrica rotante sono: perdite nel rame, che hanno luogo negli avvolgimenti per effetto Joule; perdite nel ferro, che si verificano in quei tronchi del circuito magnetico nei quali il flusso varia nel tempo; si distinguono in perdite per isteresi magnetica e perdite per correnti parassite (per limitare queste ultime, i tronchi a flusso variabile vengono costruiti con pacchi di lamiere di ferro isolate tra loro e disposte parallelamente alle linee di induzione); perdite meccaniche e per ventilazione: le prime, dovute agli attriti nei cuscinetti, si possono praticamente ritenere proporzionali alla velocità del rotore; le seconde, dovute alla resistenza che l’aria oppone al moto del rotore, possono ritenersi, nei limiti pratici, proporzionali al cubo della velocità; perdite nel dielettrico, normalmente trascurabili; perdite al collettore, dovute in parte all’attrito fra spazzole e collettore e in parte alla resistenza elettrica nel contatto spazzola-collettore. Le perdite accennate determinano un innalzamento della temperatura della m. elettrica rispetto alla temperatura ambiente e richiedono sistemi di raffreddamento per lo smaltimento del calore prodotto. Nelle m. di piccola o media potenza si ricorre generalmente a ventole, portate dal rotore, che impongono all’interno della m. una circolazione di aria prelevata dall’ambiente esterno e restituita poi allo stesso; tale aria è costretta a lambire le parti calde della m. penetrando in appositi canali di raffreddamento, ottenuti distanziando tra loro i pacchi di lamierini o praticando dei fori. Particolari accorgimenti devono essere adottati se la m. (generalmente un motore) è collocata in un ambiente con atmosfera esplosiva; il raffreddamento di tutta la m. o di una parte di essa, per es. il collettore, è allora ottenuto con aria in ciclo chiuso e mantenuta a una leggera sovrapressione. Le m. di grande potenza hanno spesso un sistema di raffreddamento ad aria in ciclo chiuso e scambiatori di calore con un refrigerante esterno; nei grandi alternatori l’atmosfera interna è talvolta costituita da idrogeno, il quale presenta una maggiore conducibilità termica. I turboalternatori di potenza limitata hanno l’avvolgimento statorico raffreddato direttamente con acqua demineralizzata (i conduttori sono internamente cavi), mentre l’avvolgimento rotorico ha un raffreddamento interno forzato a idrogeno o anch’esso ad acqua.
Il rendimento effettivo di una m. elettrica è il rapporto η = Pu/Pt tra la potenza utile Pu e la potenza totale spesa Pt. Indicando con P le perdite totali, può anche scriversi η = Pu/(Pu + P). Qualora nel termine relativo alle perdite si intendano comprese, non già tutte le perdite che si hanno effettivamente, ma le più importanti di esse, si parla di rendimento convenzionale.
Tipi di servizio
Le prestazioni di una m. elettrica dipendono, fra l’altro, dal tempo durante il quale essa deve funzionare, soprattutto in conseguenza del riscaldamento cui è soggetta per effetto delle perdite di energia. Sotto questo punto di vista una m. elettrica può essere progettata per 3 tipi di servizio: servizio continuo, se deve funzionare alla sua potenza nominale per un tempo illimitato; servizio di durata limitata, se deve funzionare alla sua potenza nominale per un periodo di tempo convenuto; servizio intermittente, se deve funzionare per cicli costituiti da periodi di lavoro alternati a periodi di riposo; è di fondamentale importanza, in tal caso, il cosiddetto rapporto di intermittenza, definito come rapporto tra la durata del periodo di lavoro e la durata totale del ciclo. Una m. costruita per una determinata potenza continuativa può naturalmente funzionare a una potenza maggiore se il funzionamento è di durata limitata.
Macchine a fluido
Sotto questa denominazione si è soliti raggruppare i numerosi tipi di m. nei quali l’energia motrice, quella prodotta o trasformata, è posseduta da un fluido sotto forma di energia cinetica, di pressione, potenziale o termica; si parla in tal senso di m. motrici, operatrici, trasformatrici e trasmettitrici.
Classificazione
Per le macchine a fluido sono generalmente adottate due classificazioni: in base alla natura del fluido sono dette macchine idrauliche quelle che operano con fluidi incompressibili, macchine termiche quelle che operano con fluidi compressibili; in base all’azione motrice o resistente del fluido sono dette macchine volumetriche o macchine ad azione statica o macchine a camere chiuse quelle in cui il fluido esercita o riceve una forza in un volume delimitato, macchine ad azione dinamica o macchine a canali aperti o turbomacchine quelle in cui alla forza esercitata o ricevuta dal fluido corrisponde una variazione della sua quantità di moto; sono, per es., m. volumetriche le m. alternative e i capsulismi, m. ad azione dinamica i turbocompressori, le turbopompe, le turbine a gas e a vapore e le turbine idrauliche.
Macchine idrauliche
Sono m. in cui opera un fluido incompressibile, cioè un liquido, generalmente acqua (da cui la denominazione), ma anche olio o un altro liquido. Macchine motrici o motori idraulici sono quelle in cui l’energia di un liquido in movimento si trasmette a un organo rigido (pala di una ruota o stantuffo), animandola di moto rotatorio o alternativo, trasformandosi così in energia meccanica utilizzabile: tali sono, per es., ruote e turbine idrauliche, motori a colonna d’acqua; macchine operatrici (talvolta dette anche macchine idrofore) sono le pompe idrauliche; macchine trasformatrici sono, per es., gli iniettori e gli accumulatori idraulici; macchine trasmettitrici, infine, sono i martinetti, le presse, i torchi idraulici e i trasformatori idraulici di coppia in cui il liquido agisce da intermediario, trasmettendo azioni meccaniche da un organo a un altro di un impianto.
Macchine termiche
Sono m. che operano con fluidi compressibili (gas, vapori). L’aggettivo termico è usato non soltanto per indicare una trasformazione calore-lavoro, ma più in generale per mettere in evidenza il fatto che la compressibilità del fluido può comportare una variazione della sua temperatura (e quindi della sua energia termica), come avviene per es. nei compressori. Rientrano fra le m. termiche le m. pneumatiche che operano con gas come l’aria, per es. i motori pneumatici alternativi e rotativi; non rientrano invece fra le m. termiche gli scambiatori di calore che trasferiscono energia termica da un fluido a un altro, ma che non operano alcuna trasformazione calore-lavoro.
Macchine motrici termiche
Sono quelle in cui l’energia termica di un fluido viene trasformata in lavoro meccanico: motori alternativi e rotativi (➔ motore), turbine a vapore e a gas; m. operatrici termiche sono i compressori, le soffianti, i ventilatori, le pompe da vuoto; m. trasformatrici sono, per es., i diffusori e gli ugelli.
M. termiche devono essere anche considerate le m. cicliche formate da m. motrici e operatrici, scambiatori di calore (per es., caldaie e condensatori) o camere di combustione, nelle quali il fluido evolve secondo un ciclo termodinamico trasformando calore in lavoro oppure lavoro in calore (in quanto si ha passaggio di calore da una sorgente a temperatura più bassa a una a temperatura più alta, a spese appunto di lavoro). Nel primo caso sono necessari una m. operatrice (pompa o compressore), una sorgente di calore (esterna come una caldaia, interna come una camera di combustione), una m. motrice in cui il fluido cede a organi meccanici che compiono lavoro parte della sua energia termica, un refrigerante cui il fluido cede il calore residuo tornando allo stato iniziale. Nel secondo caso, tipico delle m. frigorifere, sono necessari uno scambiatore di calore per sottrarre calore a un ambiente da raffreddare, un compressore, un secondo scambiatore in cui il fluido cede calore all’esterno, condensando, una valvola in cui il condensato espandendosi si raffredda tornando allo stato iniziale (➔ refrigerazione).
Macchine per scrivere
La m. per scrivere o dattilografica, ormai quasi completamente sostituita dal computer, serve a imprimere su un foglio di carta una serie di lettere e segni scelti a comando da un operatore, ricavando un testo leggibile e consentendo la redazione rapida di documenti in formato standard.
L’idea di una m. per scrivere (con lo scopo in origine di far scrivere i ciechi) risale ai primi del 18° secolo. La prima realizzazione sperimentale sembra essere il tachigrafo di P. Conti di Cilavegna (1823) ma la paternità della m. per scrivere va attribuita a G. Ravizza di Novara, che costruì e brevettò 16 modelli del suo cembalo scrivano (il primo brevettato nel 1855). La fabbricazione industriale fu iniziata dalla Remington nel 1874, su brevetto Sholes, con una m. a scrittura invisibile. La prima m. industriale a scrittura visibile, in cui, cioè, ogni segno era visibile appena impresso, fu realizzata nel 1898 dalla Underwood su brevetto Frany Xaver Wagner. Notevole impulso al perfezionamento e alla costruzione delle m. per scrivere ha dato in Italia la Olivetti.
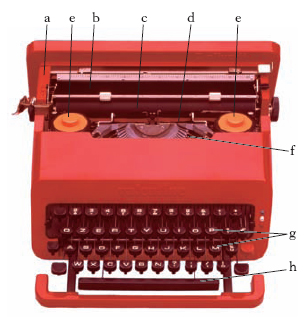
Le tappe che hanno segnato l’evoluzione delle m. per scrivere sono sostanzialmente tre: la m. per scrivere meccanica, la m. per scrivere ad azionamento elettrico e la m. per scrivere a supporto magnetico. Una m. per scrivere meccanica (fig. 4) consta di una tastiera per comandare la stampa del segno desiderato, del cinematico, cinematismo che sotto l’azione della battuta porta il carattere sul foglio di carta, del meccanismo d’inchiostrazione (un nastro imbevuto d’inchiostro), del carrello, che porta la carta in posizione rispetto alla battuta, e dei comandi accessori (tasto di ritorno, marginatori, guidacarta o incolonnatore). Le m. per scrivere ad azionamento elettrico (o m. elettriche) sono essenzialmente costituite dalle stesse parti della m. meccanica; l’energia necessaria per azionare i vari meccanismi è però fornita da un motore elettrico anziché dall’operatore. Infine, alle m. elettriche si sono aggiunte le m. dotate di una memoria elementare, che permette di programmare semplici funzioni ricorrenti, come l’incolonnamento del testo al margine destro (testo giustificato) o la centratura dei titoli. Se, oltre a quella operativa, è presente una memoria permanente, la m. registra e visualizza in un display il testo composto, per il controllo e la correzione. Si può inoltre registrare il testo su un disco magnetico. La naturale estensione delle m. a supporto magnetico è rappresentata dall’insieme di un computer e di una stampante.
Macchine teatrali
Congegni che producono un effetto meccanico; sono m. le piattaforme spostabili verticalmente attraverso un’apertura del palcoscenico (buca macchinata) o per la rotazione di esso, i fili di acciaio manovrabili per effettuare voli di personaggi ecc.
Le m. erano parte integrante del teatro greco classico: l’enciclema; la μηχανή, con cui si facevano volare i personaggi; il θεολογεῖον, un praticabile mobile congegnato da produrre l’apparizione di divinità, che dava alla trama lo scioglimento finale (intervento che, nel teatro latino, ha dato origine all’espressione deus ex machina). Altre m. erano il brontèion, il κεραυνοσκοπεῖον per i lampi ecc. Nei sec. 17° e 18° la scenografia e la scenotecnica raggiunsero la spettacolarità con m. adatte alla rappresentazione di apoteosi, in cui un Olimpo appariva e scompariva, discendendo dal cielo o ascendendo dal sotterraneo, innalzato da m. munite di braccia mediante le quali i personaggi a esse assicurati venivano riuniti in gruppo o allontanati. La scenotecnica moderna utilizza effetti di luce e di proiezioni per gli effetti visivi.