
forza
Causa capace di modificare lo stato di quiete o di moto di un corpo (definizione dinamica di f.), ovvero causa capace di deformare un corpo (definizione statica di f.). Ogni f. è caratterizzata da una grandezza, una direzione, un verso e un punto di applicazione: si può quindi rappresentare una f. mediante un vettore applicato, e comporre vettorialmente due forze agenti sullo stesso corpo, secondo la regola del parallelogrammo (➔), nella f. risultante (o semplicemente risultante).
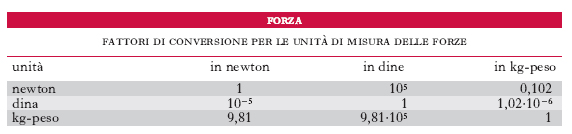
Unità di misura delle f. sono il newton nel sistema internazionale (SI), la dina nel sistema CGS, il chilogrammo-peso nel sistema pratico (per i fattori di conversione dall’una all’altra, v. tab.).
Negli ordinari problemi di meccanica non intervengono di norma che f. dipendenti dalla posizione del punto al quale ciascuna di esse è applicata, dalla velocità dello stesso punto e in qualche caso anche, esplicitamente, dal tempo. Eventualmente può mancare la dipendenza da tutti e tre questi elementi e si ha in tal caso una f. costante; può essere che la f. dipenda soltanto dalla posizione del suo punto di applicazione e si parla allora di f. posizionali, tra le quali particolare rilievo hanno le f. conservative. Il termine f. fu in passato, ed è talvolta anche oggi adoperato, in un senso vago o erroneo; in particolare è errato dire che un corpo si muove per f. d’inerzia, volendo significare che esso si muove per inerzia, cioè in assenza di f. attiva.
Tipi di forze
F. apparenti (o fittizie) del moto relativo F. che intervengono generalmente nel moto di un corpo rispetto a un sistema di riferimento non inerziale (➔ dinamica). In un tale sistema di riferimento il moto di un corpo puntiforme subisce, rispetto al moto in un sistema di riferimento inerziale, le stesse modificazioni che si avrebbero se la forza effettiva F (cioè la f. che agisce sul corpo in un riferimento inerziale) venisse modificata con l’aggiunta di altre due forze, la f. di trascinamento e la f. complementare o di Coriolis, che insieme si chiamano appunto f. apparenti del moto relativo. Se un riferimento inerziale viene assunto come sistema di riferimento ‘in quiete’, e se m è la massa del corpo, aτ la sua accelerazione di trascinamento, v la sua velocità relativa, ω la velocità angolare nel moto di trascinamento, la f. di trascinamento vale −maτ, la f. di Coriolis −2mω×v: per tali f. non ha valore il terzo principio della dinamica, esse non sono generate da altri corpi, ma nascono solo in quanto si è scelto per la descrizione del moto un sistema non inerziale. È la f. di trascinamento quella che avvertiamo, per es., in autobus quando l’autobus accelera e noi ci sentiamo spinti indietro o quando l’autobus decelera e ci sentiamo spinti in avanti. La forza di Coriolis, quando non sia nulla, è sempre perpendicolare a ω e alla velocità relativa (circostanza per la quale la f. medesima ha la qualifica di deviatrice), si annulla ogni qualvolta v è parallela a ω e non compie in nessun caso lavoro. L’equazione fondamentale della dinamica, in un sistema di riferimento non inerziale, prende pertanto in generale la forma
![[1]](https://images.treccani.it/ext-tool/intra/images/6/65/FORMULE_forza_01.jpg)
F. attiva Ogni f. esterna al corpo sul quale agisce, che non sia di natura vincolare. Fra le f. attive si comprendono generalmente anche le eventuali f. apparenti del moto relativo. F. di attrito F. che si destano nella zona di contatto fra due corpi e che si oppongono al moto relativo fra i corpi stessi (➔ attrito). F. centrale F. posizionale la cui retta di applicazione passi sempre per un punto fisso C (centro della f.); è attrattiva o repulsiva a seconda che sia orientata dal suo punto di applicazione P verso C o in senso opposto. Se la sua grandezza dipende esclusivamente dalla distanza r=∣CP∣ (ed è il caso di maggior interesse) la f., oltre che posizionale, è conservativa. In tal caso, detta ϕ(r) la sua componente secondo CP (positiva o negativa a seconda che la f. sia repulsiva o attrattiva) il potenziale vale U=ʃϕ(r)dr; le superfici equipotenziali sono le sfere aventi il centro in C, le linee di forza le rette della stella di centro C. Rientrano fra queste ultime f. centrali la f. che una carica elettrica puntiforme esercita su un’altra, le f. elastiche ecc. L’attrazione terrestre sarebbe esattamente una f. centrale di questo tipo, con centro nel centro della Terra, se questa fosse una sfera omogenea.
F. centrifuga Locuzione che ha vari significati. a) F. di trascinamento quando il moto di trascinamento è rotatorio uniforme: detta m la massa del punto P in moto, ω la velocità angolare del moto di trascinamento, P* la proiezione di P sull’asse z della uniforme rotazione di trascinamento, essa vale mω2P*P. La f. centrifuga è conservativa; il potenziale, posto r=∣P*P∣, vale U=mω2r2/2+cost.; le superfici equipotenziali sono cilindri circolari coassiali a z. Il suo intervento (insieme al peso) spiega, per es., la forma a paraboloide di rotazione assunta, in condizioni di regime, dalla superficie libera di un liquido pesante contenuto in un recipiente in rotazione e dà ragione del metodo della centrifugazione (➔) per la separazione di particelle in sospensione in un liquido. b) Nel moto di un corpo su una traiettoria fissa, prestabilita (e realizzata mediante convenienti dispositivi vincolari: binario ecc.) è la componente della f. che il corpo esercita sul vincolo secondo la normale principale esterna alla traiettoria l. È uguale e di segno opposto alla f. centripeta che il vincolo esercita sul corpo. È la f. centrifuga che, per es., si manifesta sul sasso nella rotazione di una fionda, con una trazione dalla mano verso il sasso, tanto più intensa quanto maggiore è la velocità e minore è la lunghezza della funicella.
F. centripeta Per un corpo in moto su traiettoria obbligata l, è la componente secondo la normale principale a l (orientata verso il suo centro di curvatura) della reazione che i dispositivi vincolari, mediante i quali la traiettoria medesima si realizza, esercitano sul corpo. Se questo è assimilato a un punto e FN è la componente della f. attiva secondo la normale suddetta, la reazione centripeta vale mv2/ρ−FN, essendo m la massa del punto, v la sua velocità, ρ il raggio di curvatura locale di l.
F. conservativa F. posizionale, determinante un campo, detto anch’esso conservativo, che gode della seguente proprietà: per spostare un corpo in esso immerso da una posizione A a una posizione B il lavoro fatto per vincere le sole f. del campo non dipende dal particolare percorso seguito per passare da A a B ma solo dalla posizione di A e di B; ciò sta a indicare che questo lavoro non viene dissipato in calore o trasformato in altre forme di energia ma conservato, accumulato sotto forma di energia meccanica (potenziale) del corpo e integralmente restituito quando il corpo ritorni in A per un percorso qualsiasi. Sono conservative tutte le f. costanti, il peso, la f. di gravitazione universale, le f. coulombiane, la f. (di trascinamento) centrifuga, tutte le f. centrali dipendenti dalla sola distanza fra punto potenziante e punto potenziato (quindi in particolare le f. elastiche) ecc. (➔ campo).
F. di contatto In contrapposizione a ‘f. a distanza’, f. che si desta al contatto tra due corpi.
F. controelettromotrice F. elettromotrice di senso tale da opporsi al passaggio di corrente elettrica in un circuito, agente quindi in senso opposto alla f. elettromotrice primaria, che determina la corrente in questione.
F. coulombiana F. conservativa, di attrazione o repulsione, che si esercita secondo la legge di Coulomb fra cariche elettriche puntiformi (➔ Coulomb, Charles-Augustin de): la forza è proporzionale al prodotto delle cariche (q1 q2), inversamente proporzionale al quadrato della distanza d fra le cariche stesse, attrattiva se le cariche hanno segno opposto, repulsiva se hanno lo stesso segno. Nel SI il suo modulo è pari a q1 q2/4πεd2, dove ε è la costante dielettrica del mezzo in cui si trovano le cariche.
F. dissipativa In contrapposizione a ‘f. conservativa’, f., come l’attrito e in generale come ogni resistenza passiva, che provoca una dissipazione di energia. F. a distanza In contrapposto a ‘f. di contatto’, mutua azione fra corpi posti a distanza l’uno dall’altro in un mezzo materiale o nel vuoto (➔ interazione). F. effettiva (o reale) In contrapposto a ‘f. apparente’, f. indipendente dal moto del riferimento. Il risultante delle f. effettive è la forza F che figura nella corrispondente equazione vettoriale del moto, F=ma, come causa del moto medesimo se il moto è riferito a un sistema inerziale o che si muova rispetto a queste di moto traslatorio rettilineo uniforme. Qualora si adoperi un diverso sistema di riferimento, in luogo di F va scritto, nell’equazione, il risultante di F e delle f. apparenti del moto relativo.
F. elastica Particolare f. centrale, precisamente f. del tipo F=c PO, ove c è una costante positiva, P il punto su cui agisce la f., O il centro (fisso) della f.: si tratta quindi di una f. attrattiva di grandezza proporzionale alla distanza dal centro. Il moto di un punto soggetto a f. elastica è un moto centrale, risultante in generale dalla composizione di due moti armonici di uguale centro e uguale periodo: la traiettoria è pertanto, in generale, un’ellisse e si riduce per particolari condizioni iniziali a una circonferenza o a un segmento percorso con moto armonico. F. di natura elastica intervengono in tutti i fenomeni fisici vibratori quando si possa prescindere dalle resistenze passive. Di tale tipo è, per es., l’azione esercitata da una molla, tanto più intensa quanto più la molla è tesa o compressa; così pure, le f. che si destano in un solido elastico deformato.
F. elettrica La f. da cui è sollecitata una carica q in un campo elettrico, pari al prodotto di q per l’intensità del campo in questione (➔ campo).
F. elettromotrice Grandezza, usualmente indicata con la sigla f.e.m., con cui in elettrologia si caratterizza la causa responsabile del passaggio di una corrente elettrica in un circuito elettrico. La locuzione è espressiva ma impropria: la f.e.m., infatti, non ha le dimensioni di una f., ma quelle di una differenza di potenziale elettrico (d.d.p.). Una f.e.m. deriva da fatti che possono essere non soltanto elettrici, e precisamente dalla conversione di energia di natura non elettrica in energia elettrica. A seconda della natura dei fenomeni di conversione energetica dai quali deriva, una f.e.m. può risultare continua, cioè sensibilmente costante nel tempo, oppure variabile; tra le f.e.m. variabili particolare rilevanza hanno quelle periodiche, e specialmente quelle alternate. F.e.m. continue si hanno, per es., nelle pile chimiche; f.e.m. alternate si hanno invece, per es., negli alternatori. F. esterna Ogni f. agente su un elemento di un corpo o sistema di corpi che non provenga da altri elementi dello stesso corpo o sistema. Le f. esterne possono essere attive o vincolari, motrici o resistenti ecc. La considerazione delle f. esterne e in particolare del loro risultante e del loro momento riesce di capitale importanza nella dinamica e nella statica.
F. fittizia Ogni f. che non sia effettiva: sono cioè f. fittizie le f. apparenti del moto relativo e la f. d’inerzia.
F. fondamentale Una delle quattro forze (gravitazionale, elettromagnetica, forte, debole) alle quali si possono ricondurre, a livello microscopico, tutti i fenomeni fisici (➔ interazione).
F. di gravità (o f. peso) In prossimità della Terra e in un si;stema solidale con essa, il risultante della f. di attrazione terrestre e della f. centrifuga, dovuta alla rotazione della Terra, agenti su un corpo (➔ gravità).
F. gravitazionale La f. di gravitazione universale (➔ gravitazione).
F. impulsiva F. caratterizzata dal fatto di durare per un intervallo di tempo brevissimo ma di raggiungere in tale intervallo intensità così grande che il suo corrispondente impulso abbia ugualmente un valore finito, non trascurabile, a differenza di ciò che accade per l’impulso, in un simile intervallo, delle f. ordinarie.
F. d’inerzia F. fittizia data dal prodotto, −ma, della massa di un corpo in moto per la sua accelerazione cambiata di verso. Il fatto che per un corpo (puntiforme) in moto debba essere (equazione fondamentale della dinamica) F −ma=0, mostra che le cose vanno come se il corpo fosse, durante il moto, soggetto ad una f. −ma alla quale la f. effettiva F debba fare ad ogni istante equilibrio. Di qui l’idea, in accordo con l’esperienza, e la convenienza di considerare il prodotto −ma come una f. agente sul corpo, al pari della F, non diversamente in sostanza da quanto si fa per le f. apparenti del moto relativo; ciò poi finisce col ridurre un problema dinamico a un problema statico. La f. d’inerzia generalmente è costituita da un componente tangenziale −ms̈t (s̈ accelerazione tangenziale scalare, t versore della tangente alla traiettoria) e da un componente centrifugo −(mv2/ρ) n (ρ raggio di curvatura, n versore della normale principale alla traiettoria, v velocità del punto). F. interatomiche F. che si esercitano tra gli atomi di una molecola, di uno ione o di un cristallo (➔ legame chimico).
F. intermolecolari F. che si esercitano tra le molecole o tra gli ioni o tra gli atomi di una o più sostanze (➔ intermolecolari, forze).
F. interna F. esercitata sul generico punto di un corpo o di un sistema di corpi da altri elementi dello stesso corpo o sistema. L’insieme delle f. interne in un corpo è sempre, in virtù del principio di azione e reazione, equilibrato. Ciò naturalmente non significa che esse siano ignorabili: al contrario esse possono assumere in un fenomeno importanza dominante (per es., a f. interne è dovuta una esplosione). Per questa loro proprietà di costituire un sistema equilibrato le f. interne non intervengono nelle equazioni cardinali, né della statica né della dinamica dei sistemi di punti materiali; figurano invece in generale, attraverso il loro lavoro elementare, nel teorema delle f. vive. Dal loro non intervento nelle equazioni cardinali della dinamica discende in particolare che sul moto del baricentro di un corpo qualsiasi le f. interne non possono mai influire direttamente (➔ moto). F. di Lorentz La f. deviatrice, cui è soggetta una carica elettrica in moto in un campo magnetico (➔ elettromagnetismo).
F. magnetica La f. che un campo magnetico esercita su cariche elettriche in moto, su conduttori percorsi da corrente o su magneti. F. magnetomotrice È la circuitazione del vettore campo magnetico H, estesa a un tratto di circuito magnetico o all’intero circuito; si misura, nel sistema internazionale (SI), in ampere (➔ circuitazione). Così detta per l’analogia formale che la f. magnetomotrice in un circuito magnetico ha con la f. elettromotrice in un circuito elettrico.
F. di massa F. che si manifesta sul generico elemento materiale dm di un corpo, come una f. infinitesima dello stesso ordine dell’elemento. Il peso, per es., è una f. di massa. Se f è la f. agente sull’unità di massa, cioè quel che si usa chiamare ‘intensità della f. di massa’, quella agente su dm vale fdm=fμdC, poiché l’elemento dm si ha come prodotto della densità μ (volumica, areica o lineica) per l’elemento dC della regione C (volume, superficie o linea) occupata dal corpo. L’intensità f non ha le dimensioni di una f., bensì in ogni caso quelle del rapporto di una f. a una massa, cioè di un’accelerazione: per es., per il peso, f coincide con l’accelerazione di gravità g. F. motrice In contrapposto a ‘f. resistente’, f. che dà luogo a un lavoro positivo, che cioè forma un angolo acuto con lo spostamento.
F. newtoniana In senso stretto, la f. di attrazione universale (➔ gravitazione); genericamente, qualsiasi f. che ubbidisca ad una legge dello stesso tipo della gravitazione universale (per es., le f. agenti fra cariche elettriche di segno opposto, comunemente dette f. coulombiane, sono f. di tipo newtoniano).
F. ordinaria Generalmente il termine sta a significare una qualunque f. non impulsiva: tale cioè che il suo impulso tenda a zero al tendere a zero dell’intervallo di tempo durante il quale essa agisce. F. ponderomotrice Denominazione adoperata in elettrologia per distinguere dalle cosiddette f. elettromotrici e magnetomotrici (che non sono f.) le f. alle quali sono sottoposti, in un campo elettrico o magnetico, corpi elettrizzati, corpi magnetici e circuiti elettrici.
F. posizionale F. dipendente unicamente dalla posizione del suo punto di applicazione.
F. relativa Il prodotto della massa di un punto in moto (rispetto a una terna di riferimento T) per la sua accelerazione relativa (a T); risulta uguale alla somma della f. assoluta e delle f. apparenti del moto relativo.
F. resistente In contrapposto a ‘f. motrice’, f. che dà luogo a un lavoro negativo, che cioè forma un angolo ottuso con lo spostamento, e quindi ‘resiste’ al moto del corpo. Una f. attiva può essere tanto motrice quanto resistente. Una f. vincolare, invece, o dà lavoro nullo (è, per es., il caso della reazione offerta a un corpo puntiforme da una superficie fissa e priva d’attrito sulla quale il punto si muova) oppure è resistente (per la presenza del suo componente tangenziale, l’attrito, sempre opposto alla velocità). F. come l’attrito, la resistenza del mezzo ecc., che sono per loro natura resistenti e danno luogo in ogni caso a una dissipazione di energia, prendono il nome di ‘resistenze passive’.
F. di scambio F. che si fanno intervenire per descrivere le cosiddette interazioni di scambio (➔ scambio).
F. superficiale (o di superficie) Genericamente, è una f. attiva o vincolare ripartita su una superficie o anche concentrata in un punto di essa. Generalmente, parlando di f. superficiali s’intende parlare delle f. di contatto che, in opportune condizioni di sollecitazione, si esplicano o tra particelle contigue dello stesso corpo (attraverso una superficie di separazione di due parti di esso) o fra particelle contigue di due corpi diversi a contatto. La f. agente sull’elemento dσ di superficie si ottiene come prodotto per dσ dell’intensità della f. (f. per unità di superficie), la quale ha quindi sempre le dimensioni di una pressione.
F. nucleari
F., di struttura complessa, che si esercitano tra i nucleoni e che assicurano la coesione del nucleo atomico. Le f. nucleari sono circa mille volte più intense delle f. coulombiane quando la distanza fra due nucleoni è di circa (1-2) 10−15 m; decrescono così rapidamente con la distanza da essere praticamente nulle a distanze superiori a (3-4) 10−15 m. Per dedurre le caratteristiche di queste f. nelle condizioni più semplici possibili, ci si è serviti dei risultati dello studio sperimentale dei sistemi costituiti da due soli nucleoni, ossia dei sistemi protone-neutrone, protone-protone e neutrone-neutrone, dei quali solo il primo possiede uno stato legato: il deutone. Nel caso del sistema neutrone-neutrone non è possibile fare esperienze di questo tipo in quanto non si dispone di bersagli costituiti da soli neutroni liberi. Esistono, tuttavia, metodi indiretti, basati sul confronto del comportamento di due neutroni in interazione fra loro, con il comportamento, in analoghe condizioni, di un neutrone e un protone o di due protoni in interazione fra di loro, i quali hanno permesso di trarre informazioni anche sulle f. neutrone-neutrone. Uno dei risultati più interessanti di questo lavoro di analisi dei dati sperimentali è che, purché si tenga conto a parte dell’interazione elettromagnetica, le f. nucleari sono le stesse per le tre coppie possibili di nucleoni sopra citate. Questo risultato, provato sperimentalmente con una buona accuratezza, viene oggi assunto come legge della indipendenza delle f. nucleari dalla carica, la quale, opportunamente generalizzata, acquista il significato di una legge generale fondamentale. Nonostante il notevolissimo lavoro sperimentale e teorico fatto su questo problema, non si dispone ancor oggi di una espressione semplice per queste f.; esse vengono rappresentate mediante il potenziale delle f. nucleari, V(r), il quale viene scritto come la somma di vari termini, ciascuno imposto da specifiche osservazioni sperimentali. La dipendenza dalla distanza delle varie funzioni di r che figurano nella espressione di V(r) è abbastanza complicata; tali funzioni godono tutte della proprietà di decrescere rapidamente al crescere di r, riducendosi a zero o quasi per r≥(3-4) 10–15 m. Era pensabile, a priori, che l’esperienza potesse fornire informazioni quantitative sulla dipendenza dalla distanza delle varie funzioni che figurano nella espressione di V(r) almeno per r dell’ordine di (2-4)10–15 m. Ma non è così: quello che si riesce a stabilire con sicurezza è che in questo intervallo di distanze esse tendono tutte rapidamente a zero. Qualche informazione a questo riguardo si ricava, tuttavia, da quanto si sa oggi sull’origine delle f. nucleari: esse sono dovute a un continuo succedersi di processi di emissione di un mesone da parte di un nucleone, che viene assorbito dall’altro nucleone, e viceversa. Il meccanismo è analogo a quello che dà luogo all’interazione elettromagnetica fra due corpuscoli carichi, dovuta a un continuo succedersi di processi di emissione, da parte di una delle cariche, di un fotone che viene assorbito dall’altra, e viceversa. Come il potenziale coulombiano rappresenta l’interazione, tramite il campo elettromagnetico, fra due cariche ferme o quasi, così le f. nucleari rappresentano l’interazione, tramite il campo mesonico, fra due nucleoni, fermi o quasi; come i fotoni sono i quanti del campo elettromagnetico, così i mesoni sono i quanti del campo mesonico. Pertanto, in linea di principio, dovrebbe essere possibile dedurre l’espressione esatta delle f. nucleari dalla conoscenza delle leggi del campo mesonico; questo programma, tuttavia, non è ancora stato attuato per la sua intrinseca notevole complicazione. Quello che si sa oggi dedurre con sicurezza dalle teorie mesoniche, iniziate da H. Yukawa nel 1937, è che, per valori di r maggiori di circa 2∙10−15 m, il potenziale deve avere l’andamento yukawiano, cioè
![[2]](https://images.treccani.it/ext-tool/intra/images/2/2b/FORMULE_forza_02.jpg)
dove
![[3]](https://images.treccani.it/ext-tool/intra/images/5/5f/FORMULE_forza_03.jpg)
è la lunghezza d’onda Compton del mesone π, e g è la cosiddetta costante di accoppiamento delle forze nucleari, che gioca, per queste f., un ruolo simile a quello che la carica elementare gioca per le f. elettromagnetiche. Se la massa mπ fosse nulla, lπ risulterebbe infinita, e l’espressione precedente si ridurrebbe alla legge 1/r, proprio come si verifica nel caso coulombiano, i cui quanti, i fotoni, hanno massa di quiete nulla. In conclusione, il fatto che le f. nucleari siano f. a breve raggio di azione è una conseguenza del valore finito della massa mπ del mesone più leggero esistente in natura, ossia del mesone π.