
ruota
Organo meccanico a forma di disco, che può ruotare attorno a un asse passante per il suo centro e contemporaneamente, in taluni casi, spostarsi in direzione perpendicolare all’asse di rotazione.
Fisica
R. fonica di La Cour
Dispositivo usato in passato per la misurazione della frequenza di un suono semplice; consiste in una r. portante sulla periferia una serie di denti di ferro, equidistanti, e libera di ruotare tra le espansioni polari di un elettromagnete, alimentato dalla corrente fonica generata da un amplificatore connesso a un microfono che raccoglie il suono in esame; sotto l’azione dell’elettromagnete, la r. comincia a ruotare; la sua frequenza di rotazione, misurata mediante un contagiri e un cronometro, è proporzionale alla frequenza del suono.
Tecnica
In ingegneria, oltre che nei veicoli, la r. è stata impiegata fin dai tempi antichi sia per la trasmissione del moto fra due alberi, dapprima come r. di frizione e poi come r. dentata, sia nei motori ad acqua (r. idraulica) e a vento (aeromotori).
La r. nei veicoli
Si hanno testimonianze sull’uso della r. fin da epoche remote (3400 a.C.); propriamente la scoperta di essa sarebbe dovuta alla civiltà mesopotamica o a quella dei pastori centro-asiatici, donde poi sarebbe passata ai Cinesi.
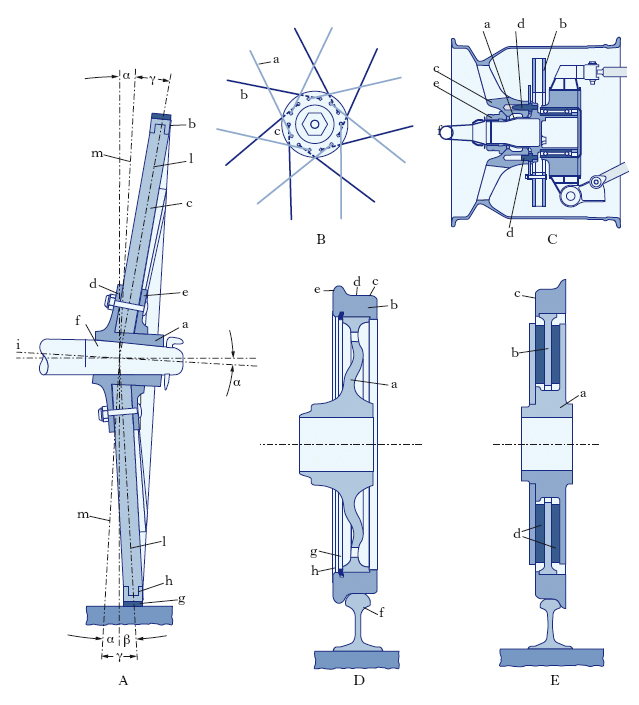
Le r. possono essere per veicoli a trazione animale, per autoveicoli e simili, ferroviarie e cingolate. Le r. per veicoli a trazione animale girano su assi fissi e sono indipendenti una dall’altra. Sono formate (fig. 1A) da un mozzo centrale a e da una corona esterna b, riuniti per mezzo di razze c. Il mozzo, generalmente metallico, è costituito da un tubo troncoconico, cui è solidale la piastra circolare d, e dalla piastra mobile e. All’interno del mozzo, si trova il perno f dell’albero (sala). La corona esterna, di forma circolare, è di legno ed è formata da tanti settori, gavelli, attorno ai quali è forzato a caldo il cerchione g, di ferro o di acciaio. Le razze, pure di legno, sono incastrate nei gavelli per mezzo di denti, o unghie h, mentre i piedi sono stretti fra le due piastre d ed e del mozzo mediante chiavarde. Le razze sono disposte con i loro assi su una superficie conica che ha il vertice sull’asse i del mozzo verso l’interno della ruota. Le r. così fatte si dicono campanate, e l’angolo γ che l’asse l delle razze forma con la perpendicolare m all’asse del perno, è l’angolo di campanatura. La r. risulta elastica, le razze sono caricate secondo il loro asse e si evita il pericolo che la r. si sfili. L’angolo γ non può essere troppo grande perché in tal caso le razze potrebbero inflettersi e rompersi all’incastro. L’asse i del perno è generalmente inclinato verso il basso di un angolo α (angolo di incavallatura) tale che la generatrice inferiore del perno si trovi sul prolungamento della generatrice inferiore della sala. Generalmente si fa γ leggermente maggiore di α, dando luogo a un piccolo angolo di strapiombo β=γ−α.
Le r. per biciclette, motocicli e autoveicoli sono del tipo metallico: il mozzo è sempre munito di cuscinetti a sfere; il collegamento fra mozzo e corona può essere realizzato, nelle r. a raggi tangenti, per mezzo di raggi di acciaio. Questi a un’estremità sono tangenti al mozzo, all’altra sono fissati alla superficie interna della corona; sono disposti in doppia serie (a e b in fig. 1B) su ciascuna estremità c del mozzo della ruota; i raggi che fanno capo a ciascuna estremità del mozzo hanno inclinazione opposta rispetto al piano verticale medio della r., ciò che consente una buona resistenza alle spinte laterali, mentre il montaggio tangenziale al mozzo permette che una variazione di coppia resistente si trasmetta dolcemente dalla corona al mozzo. È il sistema impiegato nelle biciclette, nei motocicli e in qualche tipo di autovettura sportiva. Nelle r. lenticolari delle biciclette il collegamento tra il mozzo e la corona è realizzato mediante un disco opportunamente sagomato per ridurre la resistenza aerodinamica all’avanzamento. Nelle automobili e nei piccoli autocarri sono usate in genere le r. di lamiera stampata, formate da un disco, continuo o alleggerito da fori, saldato al cerchione contro i cui bordi sono forzati i talloni del pneumatico; il disco è unito al mozzo in genere per mezzo di 4 bulloni. In alcuni tipi di autovetture le r. sono formate da un unico pezzo ottenuto per fusione, in lega leggera d’alluminio o in lega di magnesio. Le r. dei grossi autocarri e degli autobus sono formate da pezzi fusi (a disco o a stella) che formano un corpo unico col mozzo, mentre il cerchione è fissato al corpo stesso mediante bulloni. Nelle autovetture da competizione di Formula 1 la notevole larghezza dei pneumatici impone particolari tipi di r. (fig. 1C).
Le r. per rotabili ferroviari sono costituite (fig. 1D) da un centro-r., a, sempre a disco, e possono essere cerchiate, cioè provviste di cerchione b, oppure monoblocco; queste ultime sono ottenute per laminazione, mentre le prime sono ottenute per fusione o, preferibilmente, per stampaggio e laminazione. La superficie di rotolamento delle r. sia cerchiate sia monoblocco è costituita da 2 tronchi di cono, c e d, aventi un’inclinazione rispettivamente di 1/10 e di 1/20, e termina con un bordino e, sporgente verso la parte interna del rotabile; quando questo è in rettifilo, è centrato rispetto al binario e la parte del cerchione inclinata di 1/20 appoggia sulla parte centrale della superficie del fungo della rotaia il cui asse è inclinato di 1/20 sulla verticale; in tale condizione i diametri delle circonferenze di rotolamento delle due r. dell’asse sono uguali; nelle curve il rotabile, per effetto della forza centrifuga, si sposta verso l’esterno e il bordino della r. esterna si avvicina al fungo f della rotaia in misura tanto maggiore quanto più elevata è la velocità, fino a toccarlo. In tal modo nelle curve la r. esterna si sposta su un diametro e quindi su una circonferenza di rotolamento maggiore, mentre la r. interna si sposta su un diametro e su una circonferenza di rotolamento minore; la conicità delle r. consente perciò di fare a meno per gli assali ferroviari dei dispositivi differenziali che diversamente si richiederebbero per evitare gli slittamenti delle ruote. Si usano acciai debolmente legati, con carico di rottura tra 600 e 800 N/mm2. Il cerchione è montato a caldo ed è tenuto in sesto da un cerchietto di sicurezza g, che viene montato immediatamente dopo il calettamento del cerchione e bloccato mediante rullatura dell’appendice h del cerchione stesso con apposita macchina. Di tipo particolare sono le r. elastiche, nelle quali il mozzo (a in fig. 1E) è collegato alla corona b, e quindi al cerchione c, tramite tamponi elastici d. Tali r., pur essendo ancora in uso, non vengono più costruite.
Per le r. cingolate ➔ cingolo.
R. libera
Tipo di innesto automatico che collega tra loro albero e mozzo in modo da sbloccarli quando le forze applicate producono rotazione relativa in un senso, ma da bloccarli, realizzando la trasmissione del moto, quando le forze applicate tendono a produrre la rotazione relativa di verso contrario. Tipica applicazione della r. libera è quella della bicicletta, in cui il pedale può trasmettere il moto in avanti, ma quando gira all’indietro non trascina la r. (che resta libera); reciprocamente, la r. non trascina in avanti i pedali ma trasmette il moto a essi se gira all’indietro. Oltre che nelle biciclette, dove il vantaggio consiste nel poter mantenere fermi i pedali mentre la bicicletta è in moto, la r. libera è impiegata nei cambi automatici delle autovetture in corrispondenza alla marcia ‘normale’, quando è opportuno che le r. girino liberamente, anche se il motore è al minimo per abbandono del pedale dell’acceleratore. Quando è invece opportuno disporre del ‘freno motore’ (per es., in discesa) il cambio viene predisposto in posizione di selezione per la quale la r. libera è esclusa dalla trasmissione.
R. propulsiva
È il più antico mezzo per la propulsione meccanica navale. Le r. propulsive, se in numero di due disposte a murata, quasi al centro della nave, ovvero con una sola r. disposta a poppa, hanno asse orizzontale, sono munite alla loro periferia di pale, fisse o oscillanti, sono parzialmente immerse e ruotano lentamente, azionate da opportune motrici. Questo tipo di r. sono adatte per la navigazione in acque interne e non in mare aperto.
R. dentate
Caratteristiche generali
Sono r. munite alla periferia di denti di forme opportune, disposti esternamente o internamente a una corona, intervallati di un angolo costante; possono ingranare tra di loro e trasmettere per contatto dei rispettivi denti il moto, le coppie e le potenze tra i due alberi portati dal telaio. Costruttivamente sono formate da un mozzo unito mediante razze o mediante disco (eventualmente con fori di alleggerimento) alla corona dentata; su quest’ultima si ricavano i denti mediante apposite dentatrici. Mozzo, razze (o disco), corona sono generalmente ottenuti di pezzo per fusione o per fucinatura. Il mozzo è collegato all’albero mediante linguette, chiavette, profili scanalati, innesti o mediante forzamento; nel caso di piccole r. (rocchetti), la r. può essere di pezzo con l’albero. Per r. destinate alla trasmissione di grandi potenze si impiegano acciai legati di elevate caratteristiche, eventualmente sottoposti a trattamenti superficiali di indurimento. In altri casi sono impiegati materiali di vario tipo: ottoni, bronzi, duralluminio, materie plastiche ecc. Tramite le r. dentate si può realizzare la trasmissione del moto tra assi paralleli (r. cilindriche), incidenti (r. coniche) o sghembi (r. per assi sghembi o iperboloidiche).
Vengono costruite anche r. dentate ellittiche per realizzare un moto tra assi paralleli con rapporto di trasmissione ciclicamente variabile in ogni singola rotazione di 360°.
R. cilindriche a denti diritti
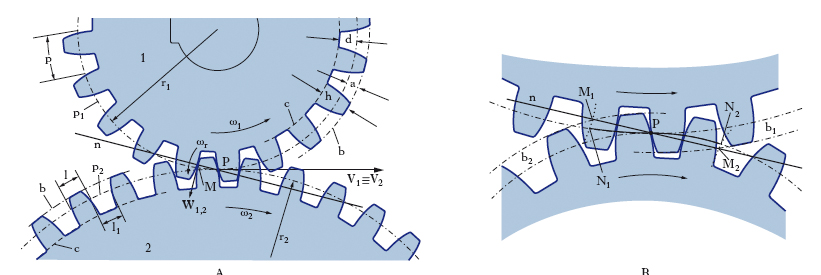
Il moto relativo delle due r. (1 e 2 nella fig. 2A) è definito dal rotolamento senza strisciamento di due cilindri (superfici primitive) o più semplicemente, nel piano normale agli assi delle ruote, dal rotolamento di due circonferenze, p1 e p2 (polari del moto relativo), dette primitive. Si definisce rapporto di trasmissione τ della coppia il rapporto tra il numero di giri della r. condotta n2 e il numero di giri della r. motrice n1, ovvero il rapporto ω2/ω1 fra le due velocità angolari; coincidendo le velocità V1 e V2 del punto di contatto P delle primitive delle r., ne consegue che τ è anche uguale al rapporto fra i raggi delle primitive r1/r2. I contatti tra le due r. non vengono però realizzati lungo le superfici primitive (r. di frizione), ma lungo superfici cilindriche (di cui i profili dei denti sono direttrici), che risultano essere superfici coniugate associate alla coppia di primitive assegnate. Più semplicemente, nel piano normale agli assi delle r. si hanno i profili dei denti come profili coniugati, tali cioè che la normale n nel punto di contatto M passi sempre per il punto di tangenza P delle primitive (centro istantaneo di rotazione). I profili coniugati strisciano tra di loro con velocità di strisciamento (per es., del dente della r. 1 rispetto al dente della r. 2) pari a W1,2 = ωrPM, essendo ωr = ω1−ω2 la velocità angolare relativa della r. 1 rispetto alla 2. La presenza di una velocità di strisciamento comporta un’inevitabile usura dei denti delle ruote. I profili coniugati sono disposti in genere a cavallo delle primitive.
Si chiama costa la parte del dente che sporge oltre la primitiva e fianco la parte interna alla primitiva. Si chiama addendum a l’altezza della costa, e dedendum d l’altezza del fianco; essi misurano quindi rispettivamente la distanza tra la primitiva e la troncatura di testa b (o esterna) e tra la primitiva stessa e la troncatura di piede c (o interna). Gli aggettivi interno ed esterno si riferiscono a r. esterne. L’altezza totale del dente è h=a+d; lo spessore del dente, misurato sull’arco di primitiva, è l; l’ampiezza del vano è l1. Si definisce passo la distanza p, misurata sulla primitiva, di punti omologhi di due denti successivi. Vale la relazione pz=πDp, essendo z il numero dei denti e Dp il diametro primitivo. Posto m=p/π (modulo), si ha anche mz=Dp. Il modulo esprime quindi la frazione z-esima del diametro primitivo. Il rapporto di trasmissione risulta dato anche da τ=z1/z2. Di norma le grandezze menzionate a, d, h, l, l1 sono espresse in funzione del modulo. Il profilo del dente della r. motrice passante per il primo punto di contatto M1 e il profilo del dente della r. condotta passante per l’ultimo punto di contatto M2 (fig. 2B), definiscono, tramite le loro intersezioni N1 e N2 con le primitive, l’arco di accesso c1=N1P e l’arco di recesso c2=PN2, la cui somma è l’arco di azione c. Per la continuità della trasmissione del moto deve essere c > p, in modo che una seconda coppia di denti inizi il contatto prima che sia terminato quello della prima coppia. Il fattore c/p si chiama fattore di ricoprimento.

R. cilindriche a denti elicoidali
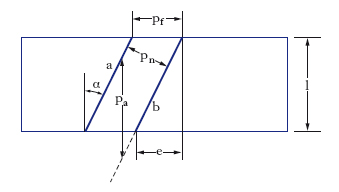
Immaginando di muovere il profilo di una r. dentata a denti diritti secondo un moto elicoidale (traslazione nella direzione dell’asse, rotazione attorno a esso) si generano le superfici elicoidali che delimitano i denti elicoidali (fig. 3). Nella fig. 4 è rappresentato lo sviluppo del cilindro primitivo di una r. a denti elicoidali avente dimensione assiale l; a, b sono le tracce degli assi di due denti adiacenti; oltre al passo delle eliche (non indicato in fig.), si distinguono 3 passi: frontale (pf), normale (pn) e assiale (pa); di essi interessano prevalentemente i primi due. Si hanno anche, in analogia: modulo frontale (mf) e normale (mn), angolo di pressione frontale (δf) e normale (δn). Conseguenza diretta dell’esistenza di un angolo d’inclinazione α è l’aumento dell’arco di azione di una quantità pari a e=ltgα. Le r. a denti elicoidali vengono tagliate con utensili che conservano le grandezze delle corrispondenti r. a denti diritti sul piano normale. I denti risultano pertanto ribassati sul piano frontale (infatti per l’addendum: a=mn<mf). Questa situazione è favorevole per la riduzione del numero minimo di denti. Una coppia di r. dentate per la trasmissione del moto tra assi paralleli è formata da r. di uguale angolo di inclinazione, ma di verso opposto (una destra e una sinistra).

R. coniche
Si usano nella trasmissione del moto tra assi incidenti. Le superfici primitive sono coni, di norma rotondi (τ=costante). Il rapporto di trasmissione τ=ω2/ω1 è esprimibile anche come rapporto tra i seni delle semiaperture dei coni: τ=senα1/senα2. Possono aversi varie configurazioni nell’accoppiamento di due coni primitivi; oltre alla configurazione piano-conica (fig. 5A), concettualmente interessante per le analogie che presenta con la coppia rocchetto-dentiera, vale la pena di considerare solo il caso di r. con assi a 90° (fig. 5B), che è quello di gran lunga più frequente. Anche in questo caso non si utilizzano i contatti tra i coni primitivi (r. di frizione), ma quelli tra le superfici coniugate, associate ai coni primitivi. Il moto relativo può anche studiarsi (fig. 5C) con riferimento a una sfera con il centro nel vertice V comune dei due coni. I coni primitivi tagliano la sfera secondo due circonferenze minori, p1 e p2, che rotolano l’una sull’altra (circonferenze primitive). Si possono inoltre definire le evolventi sferiche, s1 e s2, ottenute come traiettorie sulla sfera di un punto di una circonferenza massima c, passante per il punto di tangenza delle circonferenze primitive, nel suo moto di rotolamento sulle circonferenze e1 ed e2, intersezioni con la sfera dei due coni ai quali il piano di detta circonferenza massima c risulta tangente. Le superfici dei denti (denti diritti) si ottengono proiettando i profili s1 e s2 dal vertice V dei coni. I denti risultano rastremati e quindi sono variabili, lungo il dente, passo, modulo, addendum, dedendum ecc. Volendo comunque definire tali grandezze, esse si misurano sui coni complementari (per es., c complementare di b nella fig. 5B) contenenti le basi maggiori dei tronchi di cono primitivi. Si parla frequentemente di r. coniche a denti elicoidali (eliche coniche) o spirali (proiezione dell’elica conica sul piano ortogonale all’asse).

R. per la trasmissione del moto tra assi sghembi
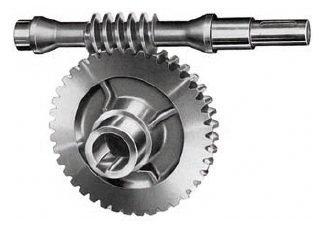
Le superfici primitive (assoidi del moto) si muovono l’una sull’altra di moto elicoidale rotolando e simultaneamente spostandosi con slittamento lungo la retta di tangenza (asse del Mozzi). Per rapporto di trasmissione costante gli assoidi sono iperboloidi rotondi rigati; da essi potrebbero ricavarsi r. iperboloidiche utilizzando ‘fette’ variamente ubicate e dotate, ovviamente, di dentatura. Si usano frequentemente r. a dentatura elicoidale, senza limitazioni per il valore e il verso di avvolgimento dei denti delle due r., con l’unica limitazione di avere lo stesso passo normale. Gli impieghi più frequenti di r. ad assi sghembi sono però quelli della coppia r. elicoidale-vite senza fine (fig. 6) e della coppia ipoidale (fig. 7). Nella coppia ipoidale i vertici dei coni delle due r. non coincidono (pertanto i coni non sono più superfici primitive della coppia).
R. di frizione (o d’attrito)
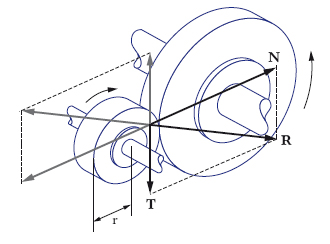
Si tratta di meccanismi destinati alla trasmissione del moto generalmente tra assi paralleli o incidenti. La trasmissione (fig. 8) avviene per effetto della componente tangenziale di attrito, T (di modulo fN, in cui f è il coefficiente di attrito), della forza di contatto R tra le superfici delle r. accoppiate. Il caso più tipico è quello nel quale le superfici di contatto coincidono con le superfici primitive, potendo queste essere cilindri o coni. Ne risulta per il rapporto di trasmissione τ la stessa relazione valida per le r. dentate. Il momento agente su una r. è dato da M=rfN. Può convenire, per aumentare il momento, rivestire le superfici a contatto di materiale a elevato coefficiente d’attrito. Comunque è sempre necessario un elevato valore della forza N, che determina sollecitazioni elevate nel meccanismo. Inoltre la regolarità della trasmissione, anche se si utilizzano molle per premere tra di loro le r., non è sicura, potendosi avere accidentali distacchi e strisciamenti dovuti a vibrazioni. Per questi motivi tali r. sono oggi raramente usate.
R. idrauliche
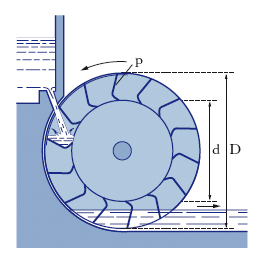
Sono macchine, per lo più motrici, note fino dai tempi antichi, le quali, talvolta ancora usate nelle campagne per la loro semplicità costruttiva, permettono di utilizzare l’energia idraulica disponibile in basse cadute o nei corsi d’acqua. Appartengono al primo tipo, per es., le r. a cassette. Queste ultime (fig. 9) portano lungo la circonferenza esterna un numero n di cassette, delimitate all’interno da un tamburo cilindrico di diametro d, e tra loro da un uguale numero n di pale p distribuite sulla periferia della r. di diametro esterno D. L’acqua che si versa nelle cassette dà luogo per il proprio peso a un movimento di rotazione. Il salto utilizzato è minore di quello teorico disponibile; oltre a ciò l’azione motrice del peso è ridotta perché le cassette cominciano a svuotarsi prima di avere raggiunto il livello inferiore, per cui il rendimento della r. (rapporto fra la potenza effettivamente raccolta sull’asse e quella teoricamente disponibile in base all’altezza di caduta e alla portata) scende a valori del 60-70 %.