
elica
Linea tracciata su una superficie cilindrica o conica, che taglia le rispettive generatrici sotto un angolo costante.
Biologia

Struttura a elica
Struttura ordinata caratteristica di alcune macromolecole biologiche caratterizzata da un passo, inteso come la distanza tra due successive spire, e da un periodo di ripetizione dell’unità monomerica. Nelle proteine fibrose e in molte proteine globulari si distinguono: l’α-e., l’e. del collageno e l’e. superavvolta. Nell’ α-e. (fig. 1), la catena principale, che costituisce la parte interna, risulta strettamente spiralizzata, ed è formata dagli atomi coinvolti nel legame peptidico tra due amminoacidi adiacenti e dall’atomo di carbonio che lega il gruppo amminico e il gruppo carbossilico in ciascun amminoacido (carbonio α, Cα). Le catene laterali dei singoli amminoacidi costituenti l’α-e. si estendono verso l’esterno, conferendo una conformazione elicoidale. I legami idrogeno intramolecolari contribuiscono alla stabilizzazione della struttura. In tutte le proteine nelle quali è stata riscontrata, l’α-e. risulta sempre destrogira. L’ e. del collageno è formata da tre catene polipeptidiche avvolte l’una sull’altra a formare una triplice e., stabilizzata da legami idrogeno intermolecolari. L’ e. superavvolta si riscontra in alcune proteine fibrose (miosina, actina); in essa due catene polipeptidiche, con struttura ad α-e., si avvolgono tra di loro a formare un’unica doppia catena ad α-elica.
Matematica
Elica circolare
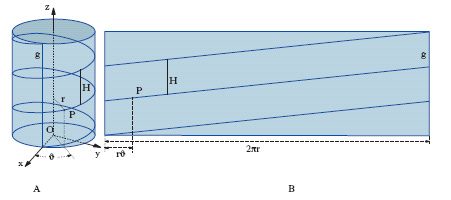
Curva sghemba descritta da un punto P animato simultaneamente da due moti uniformi, l’uno circolare in un piano normale a un asse z e con centro su z, l’altro rettilineo nella direzione dello stesso asse (fig. 2 A). Essa giace sul cilindro circolare retto, di asse z (asse dell’e.) e avente come raggio la distanza (costante) r di P da z (raggio dell’e.). L’e. si avvolge su questo cilindro descrivendo infinite spire e incontra tutte le generatrici secondo un medesimo angolo. Perciò se si taglia il cilindro lungo una generatrice, per es. la generatrice g, e lo si sviluppa su di un piano (fig. 2 B), le varie spire dell’e. si distendono lungo altrettanti segmenti rettilinei tra loro paralleli; ciò in accordo con il fatto che le e. di un cilindro circolare sono sue geodetiche. La distanza costante tra due intersezioni consecutive dell’e. con una medesima generatrice è il passo dell’e., H; un osservatore disteso lungo l’asse dell’e. può vedere l’e. salire da destra verso sinistra ( e. destra o sinistrorsa) o da sinistra verso destra ( e. sinistra o destrorsa); è quindi opportuno parlare di un verso dell’elica. Le equazioni dell’e. avente per asse l’asse Oz e passante per il punto (r, 0, 0) dell’asse x sono x=r cos ϑ; y=r sen ϑ; z=±Hϑ/2π (ϑ essendo l’anomalia del semipiano z P rispetto al semipiano z x; il segno, positivo o negativo, della coordinata z dipende dal verso dell’e.). Un’importante proprietà differenziale dell’e. è data dalla costanza del rapporto tra curvatura e torsione in ogni punto della curva.
Si chiama e. cilindrica la curva tracciata su di un cilindro a direttrice qualunque, che ne incontri tutte le generatrici formando con esse un medesimo angolo (diverso da 0 e da π/2), e che quindi sia una geodetica per il cilindro.
È detta e. conica ogni curva di un cono di rotazione, che ne incontri tutte le generatrici sotto un angolo costante.
Tecnica
Organo propulsore di navi e aeromobili ed elemento di turbine, pompe, aeromotori, costituito da due o più pale.
Descrizione e funzionamento
L’e. per propulsione aeronautica o navale è un rotore costituito da un mozzo e da pale radiali disposte simmetricamente, per ragioni di bilanciamento, rispetto all’asse del mozzo. I raggi che determinano la posizione delle singole pale appartengono a un piano che è normale all’asse dell’e., e individuano un cerchio che prende il nome di disco dell’e.; il raggio R del disco è il raggio dell’elica. Compito dell’e. è quello di accelerare la corrente di fluido che l’attraversa (aria nel caso di aeromobili, acqua nel caso di navi), in modo da ottenere per reazione la spinta necessaria al moto traslatorio di avanzamento dell’e. stessa e quindi dell’aeromobile o della nave.
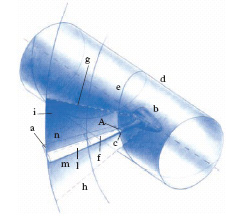
Per descrivere il funzionamento di un’e. si consideri una pala a, alloggiata nel mozzo b, la cui sezione c, ottenuta con un cilindro d coassiale all’e., sviluppata su un piano costituisce il profilo simile a quello di un’ala (fig. 3). Un generico punto della pala (per es. a) si muove su una superficie cilindrica d descrivendo l’e. e; conseguentemente il raggio f della pala, spostandosi tra due posizioni g e h, descrive una superficie elicoidale i, sulla quale la pala stessa si muove come un’ala: ciascuna pala, cioè, può essere considerata come una piccola ala dotata di moto elicoidale rispetto al fluido. Si chiama faccia passiva o dorso la superficie anteriore l della pala nel verso d’avanzamento, faccia attiva o semplicemente faccia la superficie posteriore che viene premuta dall’aria; si chiamano poi lembo di entrata, m, e lembo di uscita, n, le linee luogo geometrico dei bordi di attacco e di uscita, rispettivamente, dei profili.
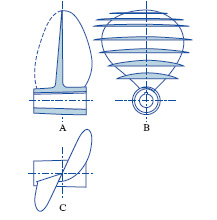
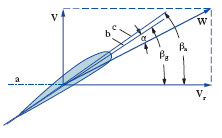
Dal punto di vista costruttivo un’e. è rappresentata indicando il numero delle pale e dando le proiezioni di una pala su tre piani così definiti: piano passante per il raggio f di fig. 3 e l’asse dell’e. (I proiezione, fig. 4 A, sezionata); piano del disco dell’e. (II proiezione, fig. 4 B); piano contenente l’asse dell’e. e ortogonale ai primi due (III proiezione, fig. 4 C). Per motivi di semplicità si adotta normalmente una rappresentazione convenzionale costituita dalla II proiezione sulla quale vengono sovrapposti alcuni profili ruotati e ribaltati di 90° (fig. 4 B). Dal disegno di un profilo a distanza r dal mozzo (fig. 5) possono essere rilevati gli angoli di calettamento geometrico e aerodinamico (βg, βa) compresi fra la traccia a del disco dell’e. e, rispettivamente, la corda b del profilo e la direzione c di portanza nulla del profilo stesso. Conseguentemente, risultano definiti il passo geometrico e aerodinamico di una data sezione come: Pg=2πr tg βg e Pa=2πr tg βa. Le e. con un passo che non varia lungo la pala sono chiamate e. a passo uniforme, mentre sono dette a passo vario le altre. Per convenzione passo p dell’e. è il passo a un raggio r=0,75R.
Dal punto di vista cinematico, il passo delle traiettorie elicoidali dei vari punti dell’e., rapporto fra velocità d’avanzamento e frequenza di rotazione, è detto avanzo, a: il rapporto (p−a)/p è detto regresso. Una importante caratteristica costruttiva dell’e. è la campanatura, consistente in un incurvamento preventivo delle pale che, nel funzionamento, viene eliminato dalla deformazione contraria determinata dai momenti flettenti generati dalla forza centrifuga e dall’azione fluidodinamica, riportando la pala nelle condizioni costruttive di progetto.
Dal punto di vista dinamico, i profili di un’e. sono progettati affinché la coppia e la potenza del motore siano utilizzate con il massimo rendimento e ciò è possibile a un regime di funzionamento (e a un assetto di volo per gli aerei) fissato. Allontanandosi da tale condizione di progetto il rendimento si abbassa rapidamente: per velocità inferiori a quella di progetto l’e. tende a frenare il motore, mentre per velocità superiori non è in grado di assorbire la coppia massima, tendendo a ruotare a velocità superiori a quella massima consentita. Per evitare questi inconvenienti tipici delle e. con pale fisse sul mozzo ( e. a passo fisso) sono stati realizzati dei meccanismi che permettono di ruotare le pale intorno al proprio asse; si ottengono così le e. a pale orientabili, sia di tipo aeronautico che navale.
E. aerea
Aerodinamica
L’e. è azionata da un motore alternativo o da una turbina a gas. Per un profilo a distanza r dall’asse di rotazione, la velocità apparente rispetto all’aria W (fig. 5) è risultante di quella di avanzamento V, uguale per tutti i profili, e di quella di rotazione Vr, pari a ωr, dove ω è la velocità angolare dell’e.; la velocità effettiva è peraltro alquanto diversa da W, sia in grandezza sia in direzione, per effetto dell’induzione aerodinamica; comunque, l’incidenza α del profilo per una data e. dipende dalla velocità di avanzamento e dalla velocità di rotazione locale. Poiché le sezioni della pala sono distribuite con una certa legge, ne viene che il regime di funzionamento di tutta la pala è individuato dalla V e dalla velocità periferica Vp=ωR e quindi il rapporto V /(ωR), indicato di solito con la lettera γ, è chiamato rapporto di funzionamento. Lo sforzo di trazione T e la coppia C si sogliono scrivere rispettivamente (formule di Renard): T=τρω2R4, C=Kρω2R5, dove τ e K, coefficienti di trazione e di coppia, funzioni di γ, sono determinati in gallerie aerodinamiche appositamente attrezzate, e talvolta in volo; ρ è la densità dell’aria. La potenza utile di propulsione è data dal prodotto di T per la velocità V; la potenza assorbita dall’e. è data dal prodotto della coppia C per la velocità angolare ω; il rapporto di queste due potenze è, per definizione, il rendimento propulsivo η dell’e.:
,
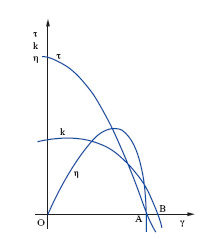
il rendimento è solamente funzione di γ poiché anche τ e K dipendono da γ. In fig. 6 sono riportati, per una data e., gli andamenti di τ, K, η in funzione di γ: τ e K decrescono con γ, mentre η è zero per γ=0 (condizione di trazione a punto fisso) e, ;dopo raggiunto un massimo, si annulla nuovamente quando τ=0 (condizione di trazione nulla: punto A); il coefficiente di coppia K si annulla in B (condizione di autorotazione con corrispondente trazione negativa, cioè azione frenante). Si hanno quindi tre stadi di funzionamento; nell’intervallo OA l’e. è motrice poiché assorbe potenza e fornisce trazione positiva; nel tratto AB l’e. pur assorbendo potenza fornisce spinte negative, cioè funziona da freno; a partire da B l’e. fornisce potenza (a spese dell’energia cinetica della corrente che l’investe) con spinte negative e funziona come aeromotore o mulinello. Il rendimento presenta un massimo a uncino, variabile fra 0,85 e 0,90 per un basso valore del rapporto di funzionamento. Al crescere di tale rapporto, cioè all’aumentare della velocità di avanzamento, insorgono fenomeni di resistenza indotta non più trascurabili. Poiché una pala dell’e. si comporta sostanzialmente come un’ala a profilo, a calettamento e a velocità variabili dal mozzo all’estremità, attorno alla pala, così come attorno all’ala, si ha una circuitazione e un insieme di vortici che ne tappezza la superficie; poiché la pala è di lunghezza finita, dall’estremità libera e dalla parte del mozzo si distaccano vortici liberi, che generano appunto un aumento della resistenza; inoltre tutta una distribuzione di vortici si distacca pure, di regola, con continuità lungo la stessa pala. L’effetto dei vortici è di incrementare la velocità delle particelle fluide; di questo incremento il componente radiale risulta trascurabile a confronto di quello assiale e di quello tangenziale: in concreto l’e. accelera assialmente e tangenzialmente una certa massa d’aria nell’unità di tempo; le corrispondenti variazioni della quantità di moto e del momento della quantità di moto della portata massica tra valle e monte dell’e. risultano uguali rispettivamente alla trazione e alla coppia motrice. Il tubo di flusso, a valle del disco entro il quale si hanno gli incrementi di velocità, costituisce la scia.
Tipologie
Le e. possono essere a due, tre, quattro, cinque o sei pale; molto diffusa è quella a due pale per piccole potenze e quella a tre pale per medie potenze; per alte potenze è impiegata l’e. a quattro pale o, più raramente, quella a cinque pale. Quando si è in presenza di potenze molto elevate o non è possibile superare certi valori per il diametro, si impiegano e. a due ordini di pale ( e. doppie controrotanti); con questa disposizione, che permette di eliminare la coppia di reazione e gli incrementi tangenziali, il comportamento del velivolo migliora. Per elevate velocità di avanzamento (>700 km/h) oppure per pale molto lunghe con conseguente elevata velocità periferica (nel caso di necessità di elevate potenze), la velocità locale sull’estremità della pala raggiunge valori transonici, con una forte riduzione del rendimento e aumento delle vibrazioni della pala. Ciò ha comportato il passaggio dalla propulsione a e. alla propulsione a reazione, limitando le applicazioni dell’e. ai velivoli lenti. Per ovviare a tali inconvenienti sono state sperimentate e. a molte pale, larghe, corte e curve (a scimitarra), indicate con vari nomi (propfan, unducted fan ecc.), che promettevano cospicui risparmi di carburante; i nuovi motori turbofan hanno ridotto il margine di risparmio consigliando il rallentamento degli esperimenti.
Problemi costruttivi
I problemi costruttivi delle pale riguardano la loro resistenza strutturale, la realizzazione del mozzo e dei meccanismi per variare il calettamento e per ovviare ai possibili danneggiamenti esterni provocati dall’ambiente (urto di detriti, formazione di ghiaccio ecc.). La pala è sollecitata dalla forza centrifuga e dall’azione aerodinamica che genera la trazione. A esse si sovrappongono sollecitazioni vibratorie, dovute alle variazioni del campo aerodinamico in cui agisce l’e. e a fenomeni di compressibilità dell’aria per elevati valori della velocità periferica (regimi transonici), che sono la principale causa del rumore generato dall’elica. Il profilo della pala è perciò spesso di forma circolare all’attaccatura con il mozzo, mentre assume la tipica profilatura aerodinamica man mano che ci si allontana dal mozzo. Nelle e. a pale orientabili il sistema di comando può essere meccanico, idraulico o elettrico. In tale tipo di e. il meccanismo di comando non solo orienta le pale in relazione alla condizione di volo prescelta, ma, in genere, corregge le variazioni accidentali della velocità angolare del motore variando automaticamente il calettamento delle pale e quindi l’assorbimento di potenza dell’e. ( e. a giri costanti). Operazione fondamentale per le e. aeree è il loro equilibramento statico e dinamico.
Per le e. sostentatrici degli autogiri ed elicotteri ➔ elicottero e rotore.
Nell’architettura navale l’e. è il propulsore di gran lunga più diffuso su navi di qualunque tipo e grandezza: introdotto in pratica nel 1830-40, con disposizione poco diversa dall’attuale, cioè a poppa estrema, sotto il galleggiamento, con azione propulsiva, da P.-L.-F. Sauvage in Francia, da F.P. Smith in Inghilterra, da J. Ericsson in Svezia, presto sostituì, per la maggiore sicurezza, la grande semplicità e le migliori caratteristiche nautiche, la precedente ruota propulsiva.
Descrizione
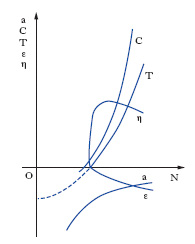
L’e. navale è costituita da un certo numero di pale eguali (tre, quattro e qualche rara volta due o cinque) portate da un mozzo centrale. Elementi geometrici essenziali di un’e. sono: il diametro, il passo medio dell’elicoide, il rapporto tra diametro e passo (generalmente 0,9-1,3). Elementi meccanici: la pressione idrodinamica (generalmente ≤ 1 bar); la velocità periferica (generalmente ≤ 60 m/s) e il regresso (generalmente 25-30%). L’e. navale è sempre propulsiva, cioè ‘spinge’ la nave: in prima approssimazione, a regresso costante, le spinte e i momenti sono proporzionali al quadrato della frequenza di rotazione e al quadrato delle velocità di avanzamento, in campo più vasto, la spinta, la coppia e il rendimento (rapporto fra lavoro della spinta e lavoro della coppia motrice) variano generalmente come indicato nei diagrammi di fig. 7. Per l’e. isolata i rendimenti non superano 0,75, perché l’e. navale funziona in ambiente disturbato dalla carena, in acqua ricca di aria e perciò favorevole al formarsi di fenomeni di cavitazione e di vibrazioni ( e. cantante). Per avere buoni risultati occorrono e. di grande diametro e relativamente lente (bassa velocità periferica e basso regresso), le quali offrono anche le migliori qualità nautiche (manovrabilità, efficienza di retromarcia, efficienza di rimorchio), e pale sottili e ben levigate. Ma è pure necessario che la poppa della nave, con le sue appendici, sia bene armonizzata col propulsore. Va osservato che quando l’e. funziona in marcia indietro, cioè quando il dorso diventa faccia attiva, le caratteristiche idrodinamiche mutano completamente, il rendimento cade ecc.
Funzionamento idrodinamico
Numerose teorie sono state proposte sul funzionamento idrodinamico delle e. navali (W. Froude, D.W. Taylor ecc.), ma il metodo più sicuro per il loro proporzionamento è ancora quello sperimentale, o al vero, o in base alla legge di similitudine meccanica sopra grandi modelli, questi ultimi provati nelle ‘vasche navali’ o nei cosiddetti tunnel delle e. o gallerie di cavitazione. Nella maggioranza dei casi le navi sono propulse da una sola e., disposizione ottima per semplicità e rendimento, ma quando la potenza complessiva dell’apparato motore è elevata (oltre 10.000 kW per asse) o quando si tratta di garantire la sicurezza (navi da passeggeri, navi da guerra ecc.) si impiegano due, tre e quattro eliche, sempre a poppa.
Tipologie. - Le normali e. si costruiscono oggi di bronzi speciali e di ghisa, qualche volta di acciaio; hanno preferibilmente le pale formanti un unico blocco con il mozzo, si lavorano accuratamente con apposite macchine ‘a copiare’, si equilibrano staticamente e, se veloci, dinamicamente. Hanno anche trovato applicazione con successo tipi speciali di e. navali (alcune preconizzate da gran tempo); tra esse, le e. a mantello o a pompa (G. Buchi, in Italia, L. Kort in Germania), dove l’e. funziona in un corrispondente tubo fisso, svasato verso poppa; le e. a pale orientabili o reversibili (società Kamewa, in Svezia, Matteucci e Ranzi in Italia), le cui pale, girevoli sul loro piano di attacco al mozzo, possono, con opportuni meccanismi, essere diversamente orientate fino a invertire la direzione della spinta, senza mutare il senso di rotazione; le e. doppie controrotanti (G. Rota, in Italia), costituite da due e. coassiali, adiacenti, che girano in senso inverso, producendo però ambedue spinta utile nella stessa direzione, e che sono generalmente adoperate per l’apparato propulsore dei siluri; le e. uncinate, con bordo d’attacco dei profili a forma di falce ed estremità appuntita, allo scopo di far meglio lavorare le pale nel flusso irregolare della corrente che, lambendo la carena nel suo moto, giunge a poppa: trovano applicazioni in sommergibili e navi mercantili; le e. timone, che, dotate di asse in grado di ruotare attorno a un asse verticale con conseguente variazione della direzione della spinta, agiscono, oltre che come propulsori, come organi di governo, e che trovano larga applicazione, per es., nei motori fuoribordo. Da ricordare infine, per navi veloci, per es. cacciatorpediniere, le e. supercavitanti, nelle quali il profilo delle pale viene troncato ove inizia il distacco della vena fluida: le e. supercavitanti lavorano quindi in regime di cavitazione senza che ciò implichi in pratica corrosione delle pale.
L’ e. trasversale o di manovra è un’e. con asse disposto ad angolo retto rispetto a quello della nave, alloggiata in apposito canale cilindrico all’estremità di prora o di poppa; è impiegata unicamente in porto nelle manovre o, in tipi speciali di navi (navi idrografiche, pescherecci, traghetti ferroviari), per mantenere la prua orientata in una determinata direzione indipendentemente dal vento e dal mare.