
volo
La capacità di sostenersi e di muoversi nell’aria, caratteristica degli Uccelli e di altri organismi viventi e realizzata anche dall’uomo, sia con aerostati (palloni e dirigibili) sia con aerodine (aeroplani, elicotteri ecc.).
Fisica e trasporti
Meccanica del volo
La meccanica del v. studia le traiettorie e le caratteristiche del moto che un aeromobile sviluppa sotto l’azione delle forze aerodinamiche, propulsive e inerziali. Le specifiche di progetto di un aeromobile richiedono che esso esegua determinate missioni di v. mantenendo livelli di prestazioni (velocità, quota di v., autonomia, massimi livelli di accelerazione, raggi di virata), di sicurezza e affidabilità al di sopra di livelli prefissati. Le prestazioni dipendono da caratteristiche strutturali e aerodinamiche, gruppo propulsore e ambiente operativo (pressione, temperatura, densità dell’aria); per quanto riguarda quest’ultimo, ci si riferisce all’Atmosfera standard, definita in sede internazionale (➔ atmosfera). Sicurezza e affidabilità dipendono da quelle di ogni sistema componente (struttura, impianti, propulsione, comandi di v., avionica). Ruolo determinante assumono stabilità, controllabilità e manovrabilità. La stabilità è la capacità dell’aeromobile di tornare a una data condizione di equilibrio, se da essa perturbato da cause esterne, con moto transitorio che soddisfi vincoli assegnati. La controllabilità è la possibilità di determinare una condizione di equilibrio per valori unitari del fattore di carico n (definito come il rapporto tra forze di massa agenti sull’aeromobile, pari alla risultante di forze aerodinamiche e propulsive, cambiate di segno, e modulo della forza peso W), per tutte le velocità e quote previste in sede di progetto. La manovrabilità è la possibilità di conseguire e mantenere condizioni di equilibrio relativo alle stesse velocità e quote, per fattore di carico non unitario. Le metodologie con cui valutare prestazioni, stabilità, controllabilità e manovrabilità dipendono dalla configurazione dell’aeromobile. Molte caratteristiche di v. si valutano con un modello matematico che lega tali caratteristiche a quelle inerziali propulsive e aerodinamiche e alle azioni di controllo generate, ipotizzando l’aeromobile come corpo rigido; se le deformazioni elastiche di elementi strutturali sono tali da generare variazioni non trascurabili di forze e momenti aerodinamici, si considerano, oltre i 6 gradi di libertà del corpo rigido, quelli introdotti dalle deformazioni (➔ aeroelasticità).
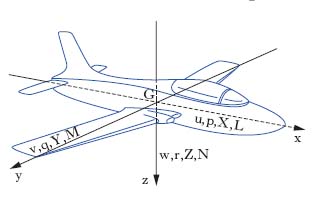
In relazione alla terna baricentrica di riferimento assi-vento (terna aerodinamica di fig. 1), con l’asse x parallelo e concorde al vettore velocità, l’asse y diretto secondo l’apertura alare, l’asse z diretto verso la parte inferiore del velivolo, le componenti della forza aerodinamica, resistenza (➔) R, devianza D e portanza (➔) P, sono espresse dalle formule
![[1]](https://images.treccani.it/ext-tool/intra/images/8/88/FORMULE_volo_F01.jpg)
le componenti del momento della forza aerodinamica rispetto agli assi (Cl, Cm, Cn) sono espresse da formule analoghe; per es. per il momento di beccheggio, intorno all’asse y, si ha
![[2]](https://images.treccani.it/ext-tool/intra/images/a/aa/FORMULE_volo_F02.jpg)
Nelle formule date il termine ρV2/2 è la pressione dinamica in N∙m−2, ρ è la densità dell’aria (in kg∙m–3) alla quota di v., V il modulo della velocità di v. in m∙s−1, A è la superficie alare in m2, l è la corda alare media aerodinamica, in m. I coefficienti di forza e momento aerodinamici sono funzioni note (per via sperimentale o analitica) dell’angolo di attacco α, dell’angolo di derapata β e dei numeri di Mach e Reynolds. Per ogni numero di Mach di v. è in genere nota la polare del velivolo, relazione tra CR e CP. La relazione analitica più usata è la cosiddetta polare parabolica:
![[3]](https://images.treccani.it/ext-tool/intra/images/9/9a/FORMULE_volo_F03.jpg)
dove CR0 è il coefficiente di resistenza per portanza nulla e Al=b2/A è il rapporto di allungamento, essendo b l’apertura alare. Poiché i numeri di Mach e Reynolds dipendono solo da velocità V e quota di v. H, si può in generale porre
![[4]](https://images.treccani.it/ext-tool/intra/images/a/a3/FORMULE_volo_F04.jpg)
in cui le variazioni di densità e temperatura atmosferiche con la quota sono quelle di un modello standard internazionale, denominato Aria Tipo Internazionale. Mediante i coefficienti aerodinamici si determinano forze e momenti agenti su un velivolo, funzioni anche delle componenti p, q, r della velocità angolare.
Per quanto riguarda forze e coppie propulsive e fattore di carico, se ne deducono espressioni adeguate per i propulsori a elica (➔) in funzione di Mach M e Mach periferico (cioè all’estremità della pala) Mp; se l’elica ha comportamento subsonico, forze e coppie dipendono solo dal rapporto tra le velocità di avanzamento e periferica. La propulsione (➔) è ottenuta per mezzo di apparati quali motoelica, turboelica (➔), turboreattore (➔). Le prestazioni di un esoreattore sono funzione dei numeri di Mach di v. M e periferico Mp, nonché di pressione e temperatura ambiente T (va anche considerato se il propulsore è a geometria variabile). Poiché in aria tipo a ogni quota H corrisponde un dato valore di T (quindi della velocità del suono), le forze e i momenti aerodinamici e propulsivi sono funzioni anche di H.
Studio delle prestazioni
Per determinare preliminarmente le caratteristiche di v. di un velivolo, si considera l’equazione del moto del baricentro nel piano di simmetria (supponendo risolti dalla manovra del pilota i problemi relativi all’equilibrio dei momenti). Ciò equivale ad assumere trascurabili le azioni di disturbo laterali (vento, dissimmetria delle azioni propulsive ecc.).

Fase di decollo
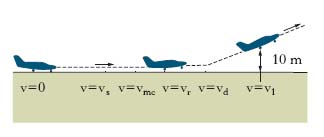
Un esempio di traiettoria di decollo è rappresentato in fig. 2. Sotto l’azione delle forze acceleratrici, partendo dalle condizioni iniziali v=0, h=0 (punto O) il velivolo raggiunge un’opportuna velocità che consente di effettuare la successiva fase di salita in sicurezza; la manovra si conclude quando con la velocità di sicurezza il velivolo raggiunge una quota di riferimento h0 (10 m). Durante il rullaggio il velivolo (in assetto di minima resistenza e con gli ipersostentatori in posizione di decollo), grazie alla spinta S generata dall’apparato propulsivo, accelera fino alla condizione v=vr (velocità di rotazione). Nella fase cosiddetta di lift-off il pilota dispone il velivolo in assetto di decollo mediante rotazione intorno al carrello principale ottenuta con l’equilibratore (➔ piano) e, raggiunta una velocità vd (alla quale P=W) inizia la fase di manovra nella quale il velivolo si inserisce su una traiettoria di salita di data pendenza. I regolamenti prescrivono che alla quota h0 si abbia per la velocità di salita v1≥1,2 vs; la velocità di stallo vs è la velocità minima di sostentazione in condizioni di fattore di carico nz=1 e coefficiente di portanza CP=CP,max con flap estesi. La velocità minima di controllo vmc è quella per cui si può controllare il velivolo in aria su traiettoria rettilinea con β=0 e angolo di rollio minore di 5° con un motore non operativo. Le forze agenti sul velivolo durante il rullaggio sulla pista sono rappresentate in fig. 3. L’equazione del moto del baricentro è la:
![[5]](https://images.treccani.it/ext-tool/intra/images/e/ee/FORMULE_volo_F05.jpg)
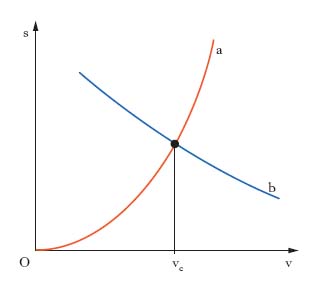
in cui μ(mg0−P) è la resistenza di rotazione del carrello e il coefficiente di attrito al rotolamento μ varia a seconda della pista; P è applicata nel centro aerodinamico, il peso mg0 nel baricentro G. Lo spazio di decollo si ottiene per successive integrazioni della [5] con opportuni CP e CR per ciascuna fase. La velocità critica (o velocità di decisione) vc è quella per cui, se si verifica un’avaria a un motore per v<vc il decollo va interrotto (poiché si impegna uno spazio di pista minore del necessario al decollo), se l’avaria si ha a v≥vc il decollo va proseguito (poiché si impegna uno spazio di pista minore di quello di arresto). Essa si determina come intersezione tra due curve (fig. 4): lo spazio di decollo in funzione della velocità a cui si verifica l’avaria e lo spazio necessario ad accelerare fino alla velocità v.
Fase di volo
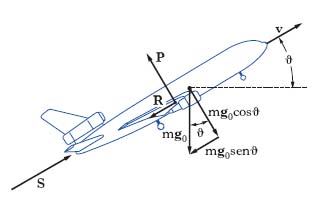
In fig. 5 sono rappresentate le forze agenti sul velivolo. Le equazioni del moto del baricentro rispetto a tangente e normale alla traiettoria di v. sono:
![[6]](https://images.treccani.it/ext-tool/intra/images/b/b9/FORMULE_volo_06.jpg)
![[7]](https://images.treccani.it/ext-tool/intra/images/c/c6/FORMULE_volo_07.jpg)
Nel caso di moto orizzontale (ϑ=0) e velocità costante si ottiene:
![[8]](https://images.treccani.it/ext-tool/intra/images/8/8f/FORMULE_volo_08.jpg)
Detto carico alare q=mg0/A, espresso in N∙m−2, la velocità minima di v., che corrisponde al CPmax (v. all’angolo d’incidenza massimo con ipersostentatori), vale
![[9]](https://images.treccani.it/ext-tool/intra/images/0/07/FORMULE_volo_09.jpg)
La velocità ascensionale vsenϑ deve soddisfare l’equazione
![[10]](https://images.treccani.it/ext-tool/intra/images/3/31/FORMULE_volo_10.jpg)
Altre caratteristiche di v. si ottengono moltiplicando la [6] per v per dare la
![[11]](https://images.treccani.it/ext-tool/intra/images/6/63/FORMULE_volo_11.jpg)
che esprime il bilancio dell’energia meccanica e mostra come l’eccesso di potenza disponibile (S−R)v, rispetto a quella necessaria per il v., si ripartisca per variare quota e/o velocità di avanzamento. L’integrazione della [11] permette di determinare per es. velocità massima, velocità minima di salita, quota di tangenza, note la polare e le caratteristiche dei motori (spinta, o potenza, in funzione di velocità e quota).
Autonomia kilometrica (raggio di azione)
Per il calcolo del raggio di azione massimo si consideri che per un velivolo con gruppo motopropulsore a elica (motori alternativi o turboeliche) il consumo specifico c di carburante è espresso in kg/s per kW di potenza installata, e perciò la variazione di massa del velivolo risulta
![[12]](https://images.treccani.it/ext-tool/intra/images/7/79/FORMULE_volo_12.jpg)
dove Π è la potenza necessaria e ηp il rendimento propulsivo. Poiché Π=Rv, nel caso di v. orizzontale a velocità costante, si ottiene:
![[13]](https://images.treccani.it/ext-tool/intra/images/5/52/FORMULE_volo_13.jpg)
essendo l’efficienza aerodinamica E, funzione di CP, data, per la [8], da E=P/R=mg0/R. L’equazione, integrata per CP=cost, dà il raggio di azione
![[14]](https://images.treccani.it/ext-tool/intra/images/a/a1/FORMULE_volo_14.jpg)
dove md è la massa al decollo del velivolo e mc la massa di carburante consumato. Il raggio di azione massimo si ottiene per angolo di incidenza per cui E=Emax. Nel caso di turboreattore, il consumo specifico di carburante è espresso in kg/s per N di spinta, per cui la variazione di massa del velivolo è data da
che, poiché S=R e R=mg0/E, diviene

Integrando la precedente per vE=cost si ha
![[15]](https://images.treccani.it/ext-tool/intra/images/f/fa/FORMULE_volo_15.jpg)
il cui massimo si verifica per angolo di incidenza a cui è massimo il prodotto vE.
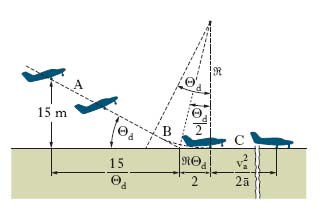
Manovra di atterraggio
Quella di atterraggio è la fase finale del v., in cui il velivolo tocca terra con velocità di discesa minore di un valore stabilito e si arresta dopo una corsa di rullaggio (fig. 6). La fase di approccio (A) inizia da una quota h0=15m sopra la pista e termina alla quota di inizio della fase di richiamata (fase di raccordo B) durante la quale si riduce la velocità verticale aumentando le forze portanti e riducendo la pendenza della traiettoria. Nella fase di manovra a terra (rullaggio C) si azionano i dispositivi di frenatura del velivolo. La velocità di avvicinamento fino alla quota h0 deve essere va≥1,3vs. Il percorso di rullaggio si determina applicando un’equazione analoga alla [5], con S orientata in verso opposto (controspinta per l’atterraggio) e con R includente i contributi dei freni aerodinamici (μ è il coefficiente di attrito volvente nella prima fase e quello d’attrito radente nella fase finale di frenata). Una formula approssimata per il percorso di rullaggio in atterraggio è
![[16]](https://images.treccani.it/ext-tool/intra/images/a/af/FORMULE_volo_form_16.jpg)
dove aa è calcolata per

e μ=0,4. In fase di rullaggio all’atterraggio, per ridurre il percorso in pista, si combina la controspinta dei motori (nei turboreattori si hanno dispositivi di inversione del getto, nelle eliche a passo variabile s’inverte il passo dell’elica) con freni aerodinamici e freni sulle ruote.
Problemi di stabilità
Il problema dinamico del velivolo e la determinazione delle caratteristiche di stabilità e di risposta ai comandi e ai disturbi esterni, si risolve per integrazione delle equazioni cardinali della dinamica (➔) riferite alla terna velivolo (fig. 1). Tali equazioni non lineari possono essere risolte o numericamente o in forma chiusa, in virtù di alcune ipotesi semplificative (per velivolo rigido, cioè indeformabile, e supposta la massa del carburante costante, linearizzazione nell’intorno di una condizione di equilibrio con la tecnica delle piccole perturbazioni e disaccoppiamento delle equazioni in due sistemi indipendenti, uno relativo al piano di simmetria longitudinale e l’altro al piano latero-direzionale). Una condizione di equilibrio è staticamente stabile se, in seguito a modifiche accidentali nelle variabili di stato, nascono nel sistema forze e momenti tali da riportarlo all’equilibrio. Un sistema è dinamicamente stabile se, rimosso dalla sua condizione di equilibrio dinamico a seguito di una perturbazione, dopo un certo tempo vi ritorna; è dinamicamente instabile se il moto riporta il sistema verso l’equilibrio iniziale ma quest’ultimo non viene ristabilito. Molti velivoli impiegano sistemi automatici di stabilizzazione. Per un’accettabile stabilità dinamica lo smorzamento delle perturbazioni deve essere rapido (tanto più quanto più piccolo è il periodo). Per la stabilità dinamica occorre stabilità statica (le cui caratteristiche influenzano la controllabilità).
Stabilità statica longitudinale
Le forze agenti nel piano longitudinale sono P, R, S, W; il momento longitudinale M di beccheggio rispetto a G è la risultante dei momenti generati dagli elementi del velivolo e di quelli dovuti alle forze citate. Un velivolo è staticamente stabile longitudinalmente quando, variatane l’incidenza di equilibrio, genera un momento che tende ad annullare la variazione; momento M e incidenza α sono assunti positivi se cabranti. Una misura della stabilità statica è fornita dal segno della derivata dM/dα per cui l’equilibrio è stabile se esso è negativo e instabile se positivo (si ha equilibrio indifferente se dM/dα=0).
Stabilità statica latero-direzionale
Nel piano latero-direzionale agiscono forze Fy e momenti di rollio intorno all’asse x e di imbardata intorno all’asse z. Essi dipendono dall’angolo di derapata β, dalle velocità angolari p e r di rollio e imbardata e dalle azioni di controllo dovute alla deflessione di alettoni e timone di direzione. Un velivolo è staticamente stabile in direzione se, variatone l’angolo d’imbardata d’equilibrio (sia per volo simmetrico, β=0 sia per volo equilibrato con β≠0), si sviluppa un momento che tende ad annullare la variazione. Il secondo tipo di stabilità laterale è associato con momenti di rollio prodotti da un angolo di derapata. Se il velivolo vola con assetto deviato, la forza aerodinamica delle due semiali varia dipendentemente da angolo diedro dell’ala, freccia, entità e posizione dell’impennaggio verticale ecc., e angolo di derapata. Se il velivolo si trova in scivolata, derapata, o altra manovra che comporta l’insorgere di volo non simmetrico, l’effetto dei parametri elencati (detto effetto diedro) fa nascere una coppia di rollio agente sul velivolo in modo da annullare la derapata stessa.
Stabilità dinamica longitudinale a comando bloccato e libero
In presenza di variazioni di incidenza e velocità possono nascere forze e momenti che dipendono da queste ultime e non tendono a riportare il velivolo in condizioni di equilibrio. A comando bloccato, i modi propri consistono in genere in una doppia oscillazione: una di lungo periodo (dell’ordine delle decine di secondi) e debole smorzamento, detta modo fugoide, l’altra di corto periodo (dell’ordine dei secondi) fortemente smorzata. A comando libero si presentano due oscillazioni simili alle precedenti e una terza oscillazione di corto periodo (dell’ordine di qualche secondo a elevate velocità) indotta sostanzialmente dall’oscillazione dell’equilibratore libero.
Stabilità dinamica latero-direzionale a comandi bloccati e liberi
A comandi bloccati in genere si hanno un’oscillazione e due moti aperiodici, uno fortemente smorzato, l’altro debolmente convergente o divergente; questa lenta divergenza è detta instabilità spirale (poiché il velivolo, effettuando una virata con parametri lentamente variabili e inclinandosi lateralmente, tende ad andare in un v. a spirale). Il secondo modo, dipendente dalle variazioni di p e di angolo di rollio, è detto modo di rollio. L’oscillazione, detta rollio olandese (dutch-roll), è in genere di corto periodo (dell’ordine di qualche secondo), smorzata a sufficienza ed è di rollio, imbardata e spostamento laterale del baricentro. A comandi liberi la previsione analitica è complessa (si hanno 5 gradi di libertà). Supponendo gli alettoni bloccati, oltre a moti analoghi a quelli a comandi tutti bloccati, si ha un’oscillazione a volte debolmente smorzata, a volte debolmente eccitata che di regola si stabilizza risultando in un’oscillazione permanente di serpeggiamento (snaking) che ricorda il dutch-roll.
Volo a motore e volo a vela
Problema fondamentale del v. è la sostentazione. Con l’aerostato (palloni, dirigibili ecc.) si ha sostentazione statica, per cui non si hanno organi mobili; la spinta verso l’alto, in grado di vincere l’attrazione terrestre, nasce dalle pressioni statiche esercitate dall’aria sulla superficie esterna dell’aerostato, contenente un gas più leggero dell’aria (idrogeno, elio). La sostentazione dinamica, o aerodinamica, è dovuta alla pressione, esercitata su un corpo di forma appropriata in moto relativo rispetto all’aria, che dà origine a una forza e a un momento risultanti sul corpo. Le componenti delle forze risultanti, normale e parallela alla velocità, sono rispettivamente portanza e resistenza. La portanza è la forza sostentatrice, la resistenza, che si oppone al moto, va costantemente equilibrata dalla spinta propulsiva fornita dal motore in modo che l’aeromobile continui a muoversi rispetto all’aria e a sostentarsi alla quota voluta. La sostentazione dinamica si ottiene facendo muovere rispetto all’aria tutta la macchina (aeroplani) o solo una parte (elicotteri). Nel primo caso la portanza si genera dalla distribuzione di pressioni esercitate sull’ala fissa, nel secondo, attraverso la rotazione della superficie rispetto a un asse (➔ elicottero). Per ridurre i percorsi di decollo e atterraggio si hanno aerei detti a decollo corto e verticale (➔ STOL, V/STOL). La fase di v. di regime (crociera) in genere si esegue alla velocità massima di minimo consumo e il v. può essere subsonico, transonico o supersonico a seconda del tipo di velivolo (➔ aviazione).
Il v. a vela si svolge con un’aerodina senza motore, ad ali fisse (➔ aliante) che, trovandosi in una massa d’aria in moto ascendente (corrente ascensionale), conserva o aumenta la propria altezza rispetto al terreno. L’aliante, privo di mezzi di propulsione, raggiunge la velocità necessaria al suo sostentamento con una modesta e costante perdita di quota, grazie alle caratteristiche aerodinamiche e costruttive, idonee a sfruttare anche deboli correnti ascendenti. In assenza di queste, un velivolo non propulso può volare in moto uniforme con inclinazione γ rispetto al piano orizzontale locale per effetto dell’equilibrio delle forze agenti su di esso. La portanza P bilancia il componente del peso W normale alla velocità V, la resistenza R è bilanciata dal componente del peso parallelo alla velocità, che agisce da forza traente per l’aliante; si ha P=Wcosγ=V2SρCP/2; R=Wsenγ=V2SρCR/2, con CP, CR coefficienti di portanza e resistenza dell’ala e S area della superficie alare; il rapporto tgγ=Cr/Cp=E, detto efficienza aerodinamica, o alare, dipende dall’allungamento alare. L’efficienza E di un aliante va da 20 sino a oltre 30, e quindi l’angolo γ risulta di pochi gradi. Perciò il requisito base per la progettazione di un aliante è un’ala di alta efficienza aerodinamica e quindi di elevato allungamento. La componente orizzontale della velocità corrisponde a
con W peso dell’aliante e ρ densità dell’aria, essendo cosγ≃1. La velocità di discesa è data da Vsenγ. Per le efficienze aerodinamiche predette e i carichi alari normali per un aliante, essa è dell’ordine del metro al secondo. Se un aliante che plana perdendo quota a 1 m/s entra in una massa d’aria che sale con velocità di 2 m/s, continuando a scendere rispetto a essa salirà rispetto al suolo a 1 m/s. Gli alianti possono percorrere lunghe distanze con limitata perdita di quota. Essi permangono a lungo in v., anche ad alte quote, ma perché il v. inizi necessitano di un aiuto esterno. Fra i sistemi di lancio sono diffusi il rimorchio, a mezzo di cavo agganciato a un velivolo a motore, e il lancio mediante verricello da terra. I moto;alianti sono dotati di un piccolo motore a pistoni che si può spegnere e riavviare in volo. Esso permette, oltre al decollo autonomo, di permanere a lungo in v. anche in assenza di condizioni di veleggiamento. Un aliante da competizione percorre in condizioni meteorologiche medie distanze di 100-500 km (in condizioni ottimali si va oltre i 1000 km) con velocità medie rispettivamente di 130-100 km/h.
In Italia, la pratica del v. a vela è regolamentata dall’Aeroclub d’Italia, cui sono federati numerosi Aeroclub presenti sul territorio nazionale. La principale manifestazione agonistica internazionale è costituita dai campionati mondiali, con tre classi di gara previste per gli alianti (standard, 15 m, libera).
Sicurezza del volo
La sicurezza del v. dipende da uomo, macchina e ambiente. Per quanto riguarda l’uomo, l’impiego sistematico del simulatore, in cui tutte le possibili emergenze (incendio di un motore, mancata uscita del carrello ecc.) sono sperimentate, mette i piloti in grado di riconoscerle e fronteggiarle. Nella macchina, la strumentazione offre sistemi di controllo e allarme centralizzati e semplifica la lettura dei controlli da svolgersi in date fasi (prima del v., prima dell’avvicinamento); fra gli strumenti per la sicurezza, il TCAS (traffic alert and collision avoidance system) è un sistema di allarme per il traffico che indica il rischio di collisioni, e il GPWS (ground proximity warning system), sistema di avvertimento della vicinanza (eccessiva) al terreno, serve a evitare uno dei tipi più frequente di incidente, l’urto contro il suolo di un velivolo in perfetto stato di funzionamento e controllabilità. L’ambiente comprende sia le condizioni atmosferiche sia le radioassistenze per la navigazione. Le più importanti cause di incidenti dovute alle prime sono le formazioni di ghiaccio e il wind shear (➔), rilevato con anemometri di pista e di cui il pilota è informato grazie alla strumentazione elettronica di bordo.
Lo strumento più importante per la sicurezza del v. è lo studio delle cause degli incidenti. In occasione dei sinistri un’inchiesta tecnica tende stabilire gli eventuali difetti di progettazione, manutenzione o condotta dell’equipaggio, per evitare che questi provochino altri sinistri; tale ricerca porta a raccomandazioni relative a modifiche di progetto, di procedure di manutenzione o di condotta del velivolo. La sequenza delle fasi del v., specie degli ultimi istanti prima dell’incidente, è ricostruita attraverso l’esame dei rottami, la lettura del registratore di v., le deposizioni dei testimoni, le perizie mediche sulle vittime.
Locuzioni particolari
Volo a coltello
Moto quasi rettilineo di velivolo in v. per qualche tempo con piano alare quasi verticale; su traiettoria orizzontale la forza sostentatrice è fornita solo dalla derapata esercitata soprattutto sul piano verticale di coda; su traiettoria inclinata, la sostentazione si ottiene come risultante di devianza e resistenza (scivolata a coltello).
Volo autoguidato
V. eseguito su indicazioni emesse dal bersaglio verso cui l’aeromobile si dirige.
Volo automatico
V. controllato per mezzo di pilota automatico.
Volo deviato
V. non simmetrico con contributo della devianza alla sostentazione.
Volo ipersonico
V. a velocità di molto superiore a quella del suono (oltre Mach 5); se il numero di Mach è maggiore dell’unità il v. è supersonico, se è inferiore è subsonico; è transonico se effettuato con numero di Mach più o meno unitario; per convenzione si usa come intervallo transonico Mach=0,8-1,2.
Volo lento
V. ottenuto con ipersostentatori e freni aerodinamici.
Volo librato (o planato)
V. con traiettoria inclinata effettuato per azione solo della gravità.
Volo livellato (o normale)
V. rettilineo e uniforme.
Volo radente
V. veloce a quota molto bassa.
Volo rovescio
V. con il dorso delle ali rivolto in basso (in v. orizzontale o quasi) o verso l’esterno della traiettoria nel caso generale di traiettoria qualsiasi.
Volo simmetrico
V. senza contributo della devianza (cioè con simmetria aerodinamica rispetto al piano di simmetria del velivolo).
Volo strumentale (o cieco)
V. effettuato con l’osservazione di strumenti di bordo senza riferimenti visivi esterni.
Volo telecomandato
V. per mezzo di telecomandi, in genere per mezzo di onde radio (v. radiocomandato).
Volo a vista
V. condotto, in condizioni di buona visibilità, in base a riferimenti a terra visibili.
In fisica nucleare, il tempo di v. di una particella è l’intervallo di tempo che la particella impiega per percorrere un dato cammino, in particolare tra due rivelatori posti a distanza prefissata, la misurazione del tempo di v. consente di risalire alla velocità della particella.
Zoologia
Capacità di volo
Le capacità di v. sono tipiche, fra i Vertebrati, degli Uccelli e, fra gli Invertebrati, della grande maggioranza degli Insetti: gli uni e gli altri provvisti di speciali organi, le ali, capaci di sostenere e far procedere il corpo dell’animale sospeso nell’aria. Anche i Chirotteri, tra i Mammiferi, volano perfettamente con capacità simili a quelle degli Uccelli; altri Mammiferi arboricoli, detti impropriamente volanti, come i cinocefali o galeopitechi tra i Dermotteri, diversi generi e specie di scoiattoli volanti tra i Roditori, nonché alcuni Marsupiali (Petaurus), per trasferirsi da un albero all’altro della foresta compiono v. planati, anche di qualche decina di metri, valendosi del patagio, piega cutanea che si distende tra gli arti anteriori e i posteriori e fra questi e la coda, funzionando come paracadute. Alcuni serpenti (Chrysopelea) riescono a planare per un certo tempo appiattendo il corpo come un nastro.
Con riferimento a Uccelli, Insetti e altri animali alati, il v. è distinto in due forme caratteristiche : v. planato (con la sua varietà del v. a vela), che si attua senza battere le ali; v. battuto, in cui le ali si muovono attivamente producendo la forza motrice di propulsione.
Il volo degli Uccelli
Strutture e adattamenti
Negli Uccelli tutta l’organizzazione dell’animale è strettamente correlata alla funzione del volo. Nel piumaggio le penne impegnate nel v. sono le remiganti, inserite lungo le ossa dello scheletro dell’ala, e le timoniere o rettrici, coperte alla loro base dalle penne sopra- e sottocaudali, che sono ancorate al pigostilo della colonna vertebrale. I principali adattamenti degli Uccelli al v. sono: a) il possesso di leggere ossa pneumatiche; b) la frequente fusione di ossa nello scheletro, che comporta una maggiore rigidità, come per es., nella colonna vertebrale, la presenza di un osso dorsale (da 2, 3 a 5 vertebre fuse); c) la robustezza della gabbia toracica e del cinto pettorale, in grado di sostenere gli arti anteriori sottoposti all’imponente sforzo del volo; d) lo sterno carenato, più pronunciato quando prevale il v. battuto, per offrire un’ampia superficie d’inserzione alle imponenti masse muscolari che muovono le ali e che rappresentano, in massa, fino al 45% del totale del corpo (il muscolo grande pettorale, che abbassa l’ala e la porta in avanti, il medio-pettorale o sopra-coracoideo, che ne è l’elevatore, il piccolo pettorale, che integra e completa l’azione del primo); e) un robusto osso coracoide stabilmente attaccato alla scapola, che si oppone alla trazione del grande muscolo pettorale; f) le clavicole fuse nell’‘osso a forchetta’; g) la respirazione strettamente correlata, durante il v., ai movimenti delle ali; h) la riduzione delle ossa dell’ala, 2 ossa carpali libere invece di 7; 3 metacarpali fuse insieme invece di 5 ossa indipendenti; i) l’avambraccio provvisto di una robusta ulna che dà sostegno a una parte delle remiganti; l) la riduzione della coda e la fusione di alcune vertebre coccigee.
Nel v. planato (o pianeggiante) l’uccello procede ad ali distese e immobili, scendendo, se in aria calma, secondo una traiettoria inclinata; oppure, utilizzando le frequenti correnti aeree ascensionali, conserva la stessa altitudine o riesce a guadagnare quota. Nel v. a vela progredisce come bordeggiando, utilizzando il vento che spira orizzontalmente, e si sostiene, non perdendo quota, senza battere le ali. Nel v. battuto, le ali sono mosse come remi, mentre la coda agisce da timone di profondità.
Dinamica del volo
Per escludere gli effetti d’inerzia, la struttura portante dell’ala (forma, costituzione e struttura delle penne, il loro profilo in sezione) è tale da conferirle il massimo di leggerezza con il massimo di resistenza elastica. L’ala inoltre, mentre batte l’aria, può cambiare periodicamente la sua incidenza, sollevando il margine principale, con il risultato che una maggior parte della corrente d’aria è convogliata a colpirne la superficie inferiore aumentando la pressione sull’ala e perciò la forza ascensionale. Per ridurre al minimo il momento d’inerzia dell’arto, i muscoli motori sono concentrati alla base prossimale dell’arto stesso e la loro azione si esplica tramite lunghissimi tendini. Nella dinamica del v., di grande importanza è il rapporto fra massa corporea e superficie di sostentamento: i grossi Uccelli, come avvoltoi e cicogne, hanno ali in proporzione molto sviluppate e grandi che, in relazione al loro momento d’inerzia che cresce assai rapidamente quanto più sono lunghe, battono l’aria molto lentamente con una frequenza di gran lunga minore di quella dei piccoli Uccelli. Per un v. veloce sono necessarie ali lunghe, strette e appuntite.
Fasi del volo
Le fasi del v. battuto corrispondono a tre diversi comportamenti dell’animale: nello slancio iniziale; durante il v.; nell’atterraggio o ammaraggio. Nella maggioranza degli Uccelli la prima fase si attua con un v. ascendente verticale, preceduto o no da uno slancio da terra o dall’acqua o da una corsa in senso orizzontale. Le ali sono drizzate al massimo, in alto sul dorso, quindi vigorosamente abbassate secondo una traiettoria obliqua diretta dall’alto in basso e dal dietro in avanti. Il corpo, tenuto diritto, riceve una spinta a sollevarsi secondo la verticale o più o meno obliquamente; raggiunta una certa altezza, il corpo s’inclina progressivamente in avanti, quindi il battito delle ali, diminuendo di frequenza, sposta la sua traiettoria in senso perpendicolare al corpo col risultato che l’azione dell’aria, che prima agiva soltanto verticalmente, si sdoppia ora in una componente orizzontale che fa spostare l’animale in avanti. Successivamente il corpo è disteso orizzontalmente e ha inizio il cosiddetto v. orizzontale o di regime, in cui l’abbassamento dell’ala si traduce in due forze: una verticale sostentatrice e una orizzontale di trazione o traslazione. Nella terza fase del v., all’atterraggio, è necessario ridurre al minimo la velocità di traslazione acquisita, ciò che si ottiene modificando l’angolo d’incidenza delle ali fino a portarle perpendicolarmente alla traiettoria di v. e frenando sull’aria con tutta la potenza dei muscoli. In questa fase finale il corpo dell’uccello riprende gradualmente la posizione verticale, nell’atteggiamento di quando spicca il v., e le ali ricominciano a battere su un piano di poco inclinato sul piano orizzontale, quindi il loro abbassarsi ostacola la corsa in avanti e l’uccello può poggiarsi avendo perduto ogni velocità orizzontale. Nelle diverse specie di Uccelli, naturalmente, si hanno tutte le varianti possibili di questi comportamenti e una grande varietà di tipi di v. (planato, silenzioso, regolare, a zig-zag, verticale ecc.).
In etologia,è detto v. di parata l’insieme di complessi volteggi che si osserva spesso nei rapaci, avente funzione dimostrativa e intimidatoria nei confronti di elementi della stessa specie che si trovano a passare nel territorio di riproduzione di un individuo.
Il volo degli Insetti
Le ali degli Insetti sono azionate da muscoli indiretti, che deformano la cassa toracica, e da muscoli diretti. Anche la pressione dell’aria sul piano delle ali provoca alcuni effetti motori. Nel v. degli Insetti tutta l’ala può essere inclinata a costituire un solo piano di sollevamento, ma per lo più solo una parte della lamina alare agisce, con movimenti che possono svolgersi secondo 3 assi incrociantisi ad angolo retto (movimento orizzontale, movimento verticale e movimento di rotazione) e che debbono comporsi a coppie per ottenere l’effetto di sollevamento e di propulsione. In generale il peso sopportato dalle ali degli Insetti è molto inferiore a quello che è sostenuto dalle ali degli Uccelli. Nelle forme più piccole il minimum di superficie alare presenta un eccesso biologicamente utile di superficie portante che è talora utilizzato (come negli Imenotteri predatori) per il trasporto in v. delle prede.
Negli Insetti sociali il v. nuziale è il v. che la femmina feconda, la futura regina, compie poco dopo lo sfarfallamento, insieme con molti maschi. Durante il v. nuziale avviene l’accoppiamento; poi la femmina fecondata fonda una nuova società. Le femmine delle formiche e delle termiti dopo il v. nuziale perdono le ali; invece le regine dei Vespidi e degli Apidi le conservano. Negli Imenotteri i maschi muoiono poco dopo il v. nuziale e la regina conserva nella spermateca una provvista di spermatozoi derivante dall’unico accoppiamento, la quale dura per tutta la vita. Nelle termiti, invece, il maschio non muore e, avendo perduto anch’esso le ali, convive con la regina nella cella reale.
Il v. di orientamento è il v. di ricognizione compiuto da molti insetti appena usciti dai loro nidi, che serve per memorizzare segni di riferimento utili a ritrovare gli stessi luoghi al ritorno da voli in cerca di cibo.