
regolatore
Biologia
Enzimi r. Forme enzimatiche ad alta specializzazione con ruoli specifici nel metabolismo cellulare. Sono distinti in enzimi allosterici, la cui attività catalitica è modulata dal legame non covalente di un metabolita specifico in un sito della proteina diverso da quello catalitico (➔ allosterismo), ed enzimi modulati covalentemente, interconvertiti dalla forma attiva a quella inattiva da altri enzimi; ne è un esempio la glicogeno-fosforilasi del muscolo e del fegato.
Botanica
R. delle piante Nome dato a diversi gruppi di composti organici, prodotti dalle piante, attivi a concentrazioni millimolari, che controllano e regolano l’accrescimento e altre funzioni in qualche punto dell’organismo lontano da quello in cui si sono formati. Essi si comportano quindi come segnali o messaggeri chimici; sono detti anche ormoni vegetali o fitormoni (➔). Ai r. delle piante appartengono le auxine (➔),le gibberelline (➔ Gibberella), le citochinine, l’acido abscissico, l’acido salicilico, l’etilene, gli ormoni da ferita, le caline, l’ormone florigeno, le morfoactine. Si attribuiscono attività ormonali anche ad alcune vitamine.
Le citochinine, dette anche cinetine (o kinetine), hanno un effetto stimolante sulla divisione cellulare e un effetto molto debole sull’accrescimento per distensione. La cinetina fu isolata per la prima volta nel 1955 da F. Skoog e F.C. Steward dal tessuto midollare di tabacco coltivato in vitro. Sono state isolate da materiali vegetali anche altre sostanze ad azione simile a quella delle citochinine, come la zeatina (dal mais) e l’isopentaniladenosina. Hanno azione analoga anche la benziladenina e altri derivati, che non sono stati isolati dalle piante. La sperimentazione sull’azione delle citochinine è assai vasta e include numerose applicazioni pratiche, per es. nella conservazione dei fiori recisi.
Nel 1955 D.J. Osborne segnalò l’esistenza, in piante di cotone, di una sostanza diffusibile, capace di accelerare la caduta delle foglie, l’abscissina. Studi successivi estesi ad altre specie hanno messo in evidenza, oltre a questa, una seconda sostanza (abscissina II, o dormina o acido abscissico), un sesquiterpenoide con un atomo di C asimmetrico che le conferisce isomeria ottica e che ha permesso di dimostrarne la presenza in diverse piante (acero, betulla, frassino, salice ecc.). Questo ormone è attivo anche come acceleratore della senescenza, come induttore della quiescenza e inibitore della germinazione.
L’acido salicilico stimola la respirazione cianuro-resistente (ossidasi alternativa), soprattutto nelle piante della famiglia delle Aracee. La sua attivazione comporta la produzione di calore che libera sostanze volatili quali indoli e/o poliammine per l’impollinazione entomifila; inoltre è responsabile della resistenza a fitopatogeni inducendo la produzione di enzimi della famiglia delle patogenasi (PRP) che determinano la resistenza sistemica acquisita (SAR).
L’etilene, piccola molecola gassosa molto più semplice di quelle degli altri r., ha il vantaggio, in quanto gassosa, di essere rapidamente diffusibile. La biosintesi dell’etilene parte dalla metionina ed è catalizzata dalla luce e dalla flavina. Il trattamento con etilene esogeno provoca vari effetti fisiologici, tra cui la caduta delle foglie, l’accelerazione della maturazione dei frutti, la stimolazione o l’inibizione (a seconda della concentrazione) dell’accrescimento per distensione, la formazione di peli radicali, l’inibizione del trasporto polare basipeto delle auxine.
Fin dal 19° sec. si ritenne che nelle rimarginazioni delle ferite operassero sostanze particolari, dette ormoni da ferita. Nel 1936 J. Bonner propose l’esistenza di un ormone traumatico (o traumatina), HOOC−CH=CH−(CH2)8−COOH, acido 1-decen-1,10 dicarbossilico, che ha l’effetto di stimolare la divisione cellulare intervenendo nei processi di rigenerazione con effetti compensatori atti a ristabilire le condizioni di normale sviluppo che sono state disturbate da ferite e simili.
Dell’esistenza delle caline (distinte in caulocaline, rizocaline, blastocaline ecc.) si hanno prove indirette, nonostante la notevole mole di lavoro dedicata ai tentativi di caratterizzarle. Si suppone che siano adibite all’organizzazione dell’organismo secondo il suo piano di sviluppo, coordinando l’azione dei vari r. e, in secondo luogo, le attività organogenetiche.
L’ormone florigeno (FT) è stato individuato nel 2007 da una équipe di ricercatori dell’università di Davis (California), dell’università di Tucson (Arizona) e da collaboratori attivi in Nuova Zelanda e Messico. Si tratta di una proteina prodotta nelle foglie quando si verifica una variazione significativa della lunghezza delle giornate e trasportato ai meristemi, o alle parti della pianta in accrescimento, attraverso la rete floematica.
Le morfoactine sono sostanze di crescita sintetiche che non sono generalmente ritenute ormoni, ma che, come altre, sembra abbiano un ruolo nella regolazione dell’accrescimento o nella mediazione di effetti già noti, per es. nella regolazione del turgore delle cellule dei pulvini.
Tecnica
Dispositivo che varia, in modo stabilito, il funzionamento di un apparecchio o il valore di una grandezza fisica; se il r. è manuale è detto anche comando, mentre per r. automatico s’intende quello che permette il controllo (➔) automatico.
R. a controllo automatico
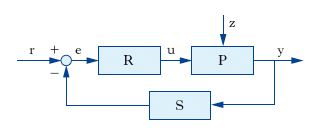
Il r. a controllo automatico è un dispositivo R (fig. 1) che, connesso al sistema o al processo da controllare P, garantisce la regolazione (➔) dell’uscita y di P rispetto a un segnale di riferimento r, cioè mantiene il suo valore di regime costante (e pari al valore di riferimento r) in presenza di variazioni delle condizioni operative del sistema (causate, per es., da disturbi z) e garantisce che il comportamento transitorio soddisfi delle specifiche.
Un sistema di regolazione è costituito da una struttura a retroazione in cui l’uscita y, misurata da un organo di misura S e confrontata con il segnale di riferimento r, genera la grandezza di errore e, in base alla quale si sviluppa l’azione di controllo, tesa ad annullarla. Nei processi industriali sono diffusi i r. standard, la cui azione controllante è a struttura fissa (adattabile variando pochi parametri alle caratteristiche dinamiche del processo in esame) e che offrono una soluzione unificata al problema della regolazione. Nei r. standard si distinguono tre azioni di controllo elementari: la proporzionale, di intensità variabile linearmente con l’errore e; l’integrale e la derivativa, per cui la grandezza di controllo dipende rispettivamente da integrale e derivata temporali dell’errore. A seconda della combinazione di azioni elementari, si parla di r. proporzionale (P), proporzionale-derivativo (PD), proporzionale-integrale (PI) o proporzionale-integrale-derivativo (PID). Nel dominio del tempo, l’andamento dell’ingresso u imposto da un controllore PID assume l’espressione
I parametri KP, KI, e KD sono la costante di azione proporzionale (o sensibilità proporzionale), integrale e derivativa rispettivamente. La funzione di trasferimento di un controllore PID vale
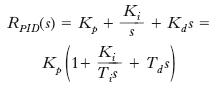
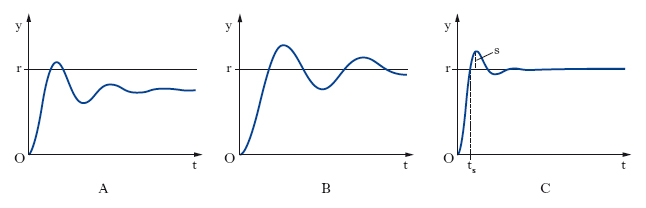
che, fisicamente irrealizzabile non essendo una funzione razionale propria, si modifica introducendovi un polo ulteriore (polo in alta frequenza), il che non altera sensibilmente il comportamento dinamico del sistema ma assicura la realizzabilità del dispositivo. Nella funzione RPID(s) compaiono, oltre alla sensibilità proporzionale, la costante di tempo integrale TI=KP/KI, e quella derivativa TD=KD/KP. Aumentando KP si riducono l’errore e in regime permanente e l’effetto di variazioni parametriche e disturbi e, nel contempo, si accresce il modulo della risposta armonica (uniformemente in tutta la banda di frequenze), con aumento della banda passante del sistema. Ciò causa però una diminuzione del margine di fase e vi è quindi un limite all’azione proporzionale oltre il quale è inficiata la stabilità del sistema controllato. Un limite analogo si impone per evitare la saturazione degli attuatori guidati dal segnale di ingresso u. L’azione integrale, per cui si introduce un polo nell’origine nella funzione di trasferimento ad anello aperto, garantisce errore nullo a regime rispetto a riferimenti costanti e a disturbi costanti a valle del dispositivo di regolazione, ma, risultando ridotti banda passante e margine di fase del sistema, può essere anch’essa dannosa per la stabilità. L’azione derivativa contrasta gli effetti indesiderati delle precedenti poiché, introducendo uno zero nella funzione di trasferimento ad anello aperto, la fase della risposta armonica, e dunque il margine di fase, aumentano; la stabilità è preservata e il comportamento transitorio del sistema migliora (in particolare, si ottiene un buon compromesso tra rapidità di risposta del sistema e l’insorgere di oscillazioni). La fig. 2 mostra l’uscita di un sistema del secondo ordine sotto l’azione di tre diversi r. standard: per entrambi i r. PI e PID, l’errore a regime rispetto al riferimento r è nullo, ma per un r. PID il tempo di salita ts e la sovraelongazione s sono ridotti rispetto al caso del r. PI.
Nel caso di sistema lineare, di cui sia noto il modello, i parametri del r. standard si scelgono facilmente grazie ai diagrammi di Bode del sistema ad anello aperto. Tuttavia due metodi empirici (detti di Ziegler-Nichols), applicabili anche se il modello del processo controllato non è noto a priori e contiene elementi non lineari, forniscono valori indicativi dei parametri del r. in base a semplici esperimenti sul processo. Alcuni r. PID industriali dispongono di procedure di autosintonizzazione dei parametri.
La tecnica realizzativa dei r. più diffusa è quella digitale, basata su microcalcolatori, che risulta poco costosa e consente programmabilità e facilità di trasmissione dei segnali (digitali); quest’ultima caratteristica rende possibile, in vasti e complessi processi industriali, l’impiego di sistemi di regolazione locali, con supervisione demandata a un anello esterno che comunica con essi tramite linee digitali. La tecnica analogica più usata è quella elettronica, per la disponibilità di componenti affidabili a costi ragionevoli; per garantire l’insensibilità ai disturbi di origine elettromagnetica, si realizzano r. con componenti fluidi.
R. di portata
Nelle costruzioni idrauliche, apparecchio, in dotazione agli edifici derivatori per la presa da corsi d’acqua naturali o artificiali, atto a garantire l’uniformità delle portate d’acqua erogata, in particolare nel caso che l’acqua debba essere impiegata per irrigazione.
Per i fluidi in condotta la regolazione viene generalmente effettuata mediante l’inserzione di un organo misuratore della portata (venturimetro, boccaglio ecc.) e la differenza di pressione da esso generata comanda, direttamente o mediante appositi servocomandi, gli organi di variazione della portata.
R. di pressione
Dispositivo che agisce in modo da impedire che in un certo ambiente la pressione salga oltre un limite prestabilito (limitatore di pressione) oppure si discosti dai valori desiderati (riduttore di pressione per bombole, stazioni di decompressione ecc.).
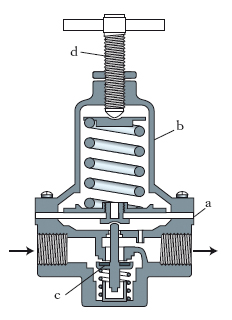
Un r. di pressione è in genere costituito (fig. 3) da un dispositivo manometrico, per es. a membrana: la pressione che superi quella per cui è tarato l’apparecchio comprime la membrana a, vincendo la reazione di una molla b, e comanda lo spostamento di una valvola a stelo c contro la sua sede, direttamente, a mezzo di una leva, o per mezzo di un servomotore; la pressione di taratura è regolata a mezzo della vite di regolazione d.
R. di umidità
È realizzato mediante uno psicrometro i cui due termometri sono elettrici; la differenza di tensione dovuta alla differenza di temperatura fra i due termometri comanda, mediante servocomandi elettrici, l’immissione o la condensazione di vapore in modo da riportare l’umidità relativa al valore prefissato.
R. di velocità
I dispositivi usati per la regolazione della velocità nelle macchine motrici a fluido agiscono o, in casi particolarissimi, sul lavoro motore (r. propriamente detti) o sul lavoro resistente (freni). Il r. propriamente detto agisce direttamente o indirettamente sull’organo di ammissione del fluido motore, intervenendo non appena si verifichi una variazione finita della velocità angolare (r. tachimetrici), oppure quando la velocità comincia a variare, quando cioè si determina un’accelerazione angolare (r. d’inerzia).
Il r. tachimetrico è basato sull’azione che la forza centrifuga esercita su uno o due elementi di massa notevole (masse attive o centrifughe), disposti nel secondo caso simmetricamente rispetto all’asse di rotazione della macchina, e collegati mediante un sistema deformabile all’organo di comando della regolazione. Il sistema deformabile è suscettibile di assumere un insieme continuo di configurazioni, a ciascuna delle quali corrisponde un determinato valore della frequenza di rotazione nell’intervallo N-n (con N e n rispettivamente massima e minima frequenza di rotazione) fissato dal voluto grado di regolarità, δ=(N+n)/[2(N−n)]. Un r. di questo tipo si dice statico o proporzionale; un r. atto in ogni sua configurazione a mantenere la frequenza di rotazione costante (δ=0) per qualunque valore del lavoro resistente si dice astatico o integrale; un r. astatico per il quale la frequenza di rotazione si mantiene costante per un’unica configurazione si dice isodromo o proporzionale integrale. Quando un r. statico consente scarti di velocità molto piccoli, avvicinandosi al tipo astatico, si dice pseudoastatico.
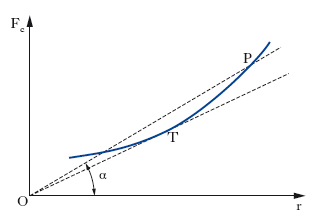
In genere, con il termine r. s’intende l’intero sistema controllante (formato per lo più di organi rivelatori, misuratori, amplificatori, servomotori, organi regolati ecc.), ma nel campo della regolazione di velocità si conserva tuttora l’uso più antico di chiamare r. l’organo misuratore, in genere un dispositivo tachimetrico. Tali dispositivi sono impiegati anche per variare la posizione di alcuni organi in funzione della velocità angolare di un motore, come, per es., nei cambi automatici delle automobili. Ai fini dello stabilimento delle corrette condizioni di funzionamento del r., notevole importanza ha la curva caratteristica, che si ottiene riportando (fig. 4) sull’asse delle ascisse la distanza r del baricentro di una delle masse attive dall’asse di rotazione e sull’asse delle ordinate i corrispondenti valori della forza centrifuga Fc. Per un punto P della caratteristica la pendenza (tgα) del segmento OP rappresenta, in opportuna scala, il quadrato della frequenza di rotazione corrispondente a quella posizione della massa attiva. Se dall’origine O si conduce la tangente alla curva, il punto di tangenza T viene a dividere la curva in due tratti, stabile quello di destra, instabile quello di sinistra.
Tra i r. d’inerzia, uno dei primi è stato il r. Charmilles, nel quale l’organo sensibile all’accelerazione è costituito da un volano collegato al mozzo dell’albero del r. per mezzo di razze molto flessibili, in modo che le razze si flettono lasciando indietro o facendo avanzare il volano rispetto all’albero a seconda che la velocità angolare dell’albero aumenti oppure diminuisca. Lo spostamento relativo che viene a generarsi fra volano e mozzo è utilizzato per comandare gli organi della regolazione. Poiché lo spostamento relativo dipende dall’accelerazione ed è quindi, a parità di accelerazione, indipendente dal valore assoluto della velocità angolare, un r. composto esclusivamente di un elemento sensibile accelerometrico non può essere adoperato da solo, in quanto non individua il valore della velocità di regime; perché il sistema acquisti il grado di staticità voluto deve essere accoppiato a un dispositivo tachimetrico, il quale interviene subito dopo per forza centrifuga. Si hanno così i r. accelerotachimetrici, nei quali l’azione concorde dei due effetti accelerometrico e tachimetrico si applica agli organi della regolazione. Si ottengono così r. di elevata sensibilità e piccola staticità i quali permettono di ridurre l’azione dell’asservimento.
Negli apparati motori marini, per es., i r. sono impiegati in particolare per impedire che l’elica possa assumere velocità di rotazione eccessive in caso di fuoriuscita dall’acqua per il movimento ondoso o a causa del beccheggio.