
missile
Corpo volante, senza pilota, con propulsione propria per tutta la traiettoria o per parte di essa (in ciò differenziandosi dal proiettile scagliato da un’arma da fuoco), portante un carico utile (una o più cariche esplosive nelle applicazioni belliche, ovvero, nelle applicazioni non belliche, strumenti scientifici, satelliti artificiali, sonde spaziali, astronavi); spesso, e specialmente nel caso che il carico utile si stacchi, a un certo istante, dal resto, si parla di m. vettore o razzo vettore o più semplicemente di vettore per indicare il dispositivo propulsore e di guida, cioè, in concreto, tutto l’apparecchio a eccezione del carico utile. Per applicazioni spaziali di messa in orbita di un carico utile come sinonimo di vettore è usato anche il termine lanciatore.
Il propulsore di un m. è a getto, e precisamente un endoreattore o motore a razzo (meno spesso, un esoreattore). Caratteristica precipua dei m., che li distingue da ogni altro tipo di aeromobile, è la possibilità di raggiungere velocità elevatissime in qualsiasi condizione ambientale, anche ad altissima quota e nello spazio extraterrestre.
Classificazione
Una prima grande suddivisione pone da un lato i m. atmosferici, la cui traiettoria si svolge interamente nell’atmosfera terrestre, e dall’altro lato i m. extraatmosferici, o vettori spaziali, destinati a porre in orbita satelliti artificiali terrestri o a lanciare nello spazio extraterrestre veicoli spaziali, con o senza equipaggio. In rapporto all’uso, un’altra grande suddivisione è quella tra m. per usi pacifici e m. per usi bellici; tra questi ultimi altre suddivisioni sono poi possibili: m. balistici, orbitanti, guidati, non guidati; m. superficie-superficie, superficie-aria, aria-aria ecc.; m. controcarro, contraerei, antimissile ecc.
Da un punto di vista strutturale si distinguono m. monostadio, composti cioè da un unico complesso (o stadio) e dotati di un’unica carica propellente, e m. polistadio, composti cioè da più stadi, ognuno dei quali viene abbandonato appena esaurita la propria carica propellente.
Costituzione schematica
In linea generale, un m. monostadio è costituito: a) da un propulsore, o generatore di spinta, comprendente i propellenti (con relativi contenitori o serbatoi, pompe, dispositivi di regolazione), la camera di combustione con i dispositivi di accensione e gli ugelli di scarico; b) da una struttura portante, di buona penetrazione aerodinamica; c) da superfici fisse e superfici mobili e/o da motori d’assetto, atti a stabilizzare e a comandare il moto del m. stesso; d) dalle apparecchiature di guida, comprendenti anche i sistemi di comunicazione a terra e l’elaboratore elettronico di controllo; e) dal carico utile che si vuole trasportare (satelliti, apparecchi di rilevamento, testate belliche ecc.). I m. polistadio, come il nome stesso fa intendere, sono costituiti da più m. monostadio, uno di seguito all’altro e di mole decrescente; esauritosi il propellente del primo stadio (il più grande), questo si stacca mentre prende a funzionare il secondo stadio, e così via sino all’ultimo stadio, che porta il carico utile.
Fra i costituenti dei m., gli scudi termici sono rivestimenti di speciali sostanze utilizzati ogni qual volta si abbia la necessità di proteggere dal forte riscaldamento cinetico, che si ha all’attraversamento degli strati atmosferici, il carico utile. Poiché il flusso di calore prodotto è circa proporzionale a √‾‾ρ∙v3 (ove ρ è la densità atmosferica, v la velocità del m.), il massimo flusso non si ha al suolo, dove è massima ρ, ma molto più in alto (dove l’effetto della velocità finisce per prevalere). Pertanto gli scudi termici vengono abbandonati, di solito, verso la fine della combustione del secondo stadio. Per un m. di 200 t al decollo, con carico utile di 1600 kg, la massa degli scudi termici è di circa 800 kg.
Propulsore e propellenti
Il propulsore è normalmente un endoreattore, cioè un propulsore a getto in cui la massa espulsa è quella gassosa producentesi nella combustione di un combustibile in presenza di un adatto comburente, anch’esso trasportato dal m.: si tratta dunque di un propulsore per il cui funzionamento non occorre, come comburente, l’ossigeno atmosferico e che quindi si adatta a essere usato anche negli strati più alti dell’atmosfera e al di fuori dell’atmosfera stessa. Per i particolari casi di m. la cui traiettoria si svolga a bassa quota, per es. per i Cruise, può essere impiegato come propulsore un esoreattore (turbofan, turbogetto, statoreattore, pulsoreattore) che necessita dell’ossigeno atmosferico per la combustione; tali m. utilizzano, per il lancio iniziale, un endoreattore oppure un aereo dal quale i m. stessi si sganciano in volo.
Considerando comunque come propulsore tipico dei m. un endoreattore, si ricorda che la grandezza principale che lo caratterizza è la spinta S, dovuta alla variazione della quantità di moto dei gas di scarico e alla differenza di pressione fra sezione di uscita, in cui la pressione è pari a pu, e ambiente esterno, in cui la pressione è pari a pa; nel caso di un endoreattore, essendo nulla la quantità di moto iniziale dei gas di scarico, la variazione di quantità di moto coincide con il prodotto della portata in massa Q per la velocità di uscita (o di efflusso) u dei gas stessi; la differenza di pressione pu−pa agisce a sua volta sulla sezione di uscita A dell’ugello; in definitiva la spinta è data da: S=Qu+(pu−pa)/A; il contributo del secondo termine è nullo quando nell’ugello si ha espansione completa (pu=pa), e risulta comunque generalmente trascurabile. Introdotta una velocità equivalente ue=u+(pu−pe) A/Q, la spinta risulta S=Que, anche se in pratica, per quanto detto, ue = u. Perché il m. possa muoversi occorre che S sia maggiore della componente del peso dell’apparecchio nella direzione della spinta medesima; le spinte al lancio richieste sono in genere rilevanti, dell’ordine di 1,5-2 volte il peso iniziale del missile. A norma della relazione S=Que, per ottenere elevati valori della spinta occorre che siano elevate portata e velocità di efflusso dei gas di scarico: utilizzando ugelli convergenti-divergenti (ugelli De Laval) si ottengono forti espansioni e quindi elevate velocità di efflusso; proporzionando opportunamente la sezione minima (sezione di gola) dell’ugello, si ottiene la portata desiderata. La grandezza che meglio caratterizza un propellente è l’impulso specifico, Isp, definito come rapporto tra la spinta sviluppata e la portata in peso di propellente (➔ impulso); l’impulso specifico si misura in secondi. I vari tipi di propellente sono stati classificati in base al loro impulso specifico.
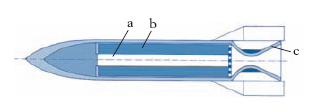
I propellenti più usati, dagli inizi dell’era missilistica, sono quelli chimici, suddivisi in due grandi categorie, solidi e liquidi. L’endoreattore a propellente solido (fig. 1) ha trovato applicazioni, soprattutto militari, su m. di piccole e medie dimensioni. Il propulsore consiste essenzialmente in una carica propellente formata da un blocco monolitico a, detto grano, alloggiato in un contenitore cilindrico b, con funzioni di serbatoio del propellente stesso e di camera di combustione; il getto dei gas combinati esce dall’ugello c. Il grano costituisce il 90-95% della massa del propulsore; esso comprende combustibile, ossidante, additivi (per il controllo della velocità di combustione) e inibitori (per ridurre la superficie di combustione). I tipi più impiegati di propellenti sono quelli omogenei e quelli compositi: i propellenti omogenei, utilizzati nei piccoli propulsori, sono così chiamati in quanto sia l’ossidante sia il combustibile appartengono alla stessa base; il tipo più noto è anche denominato a doppia base o colloidale, perché consiste essenzialmente di miscele colloidali a base di nitroglicerina e nitrocellulosa; l’impulso specifico si aggira intorno ai 200-220 s. I propellenti compositi, utilizzati nei grandi propulsori, sono invece costituiti da composti chimici differenti in cui l’ossidante, sotto forma di minutissime particelle, è disperso in una matrice che funge da legante e da combustibile; per aumentare l’impulso specifico vengono aggiunti combustibili metallici, cioè polveri di alluminio e magnesio e idruri di boro; i compositi tipici utilizzano come ossidanti perclorati o nitrati o anche polimeri come gli asfalti, le resine fenoliche, il polibutadiene; gli impulsi specifici raggiungono 250 s.
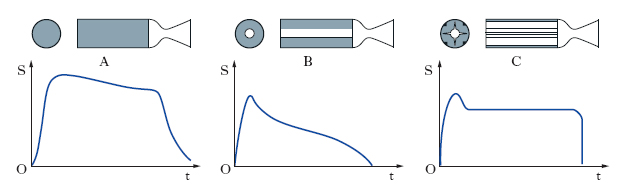
La forma del grano è elemento fondamentale per ottenere un certo valore della spinta e un certo diagramma spinta-tempo; i grani si suddividono in grani a combustione frontale, interna ed esterna. Del primo tipo sono i blocchi cilindrici pieni (fig. 2A); hanno un alto coefficiente di riempimento, ma danno luogo a spinte modeste. Il grano del secondo tipo si realizza con fori al centro del grano stesso di svariate forme (per es., come in fig. 2B), in modo da ottenere superfici di combustione e quindi diagrammi spinta-tempo di vario tipo; questa configurazione del grano trova applicazione in combustioni di lunga durata in quanto i gas di scarico non vengono a contatto con il contenitore. Il terzo tipo di grano, invece, viene usato per combustioni di breve durata; configurazione utilizzata è, per es., quella a stella (fig. 2C) che permette di ottenere elevate velocità di combustione e quindi elevate spinte. Particolarmente delicata è la fase di accensione del combustibile che, se non effettuata correttamente, può provocare la frattura del grano con conseguente combustione non uniforme. I vantaggi dei propellenti solidi derivano dai costi contenuti, dalla loro affidabilità, dalla possibilità di immagazzinarli per periodi di 4-10 anni; essi consentono, inoltre, rapidità di lancio e la possibilità di costruire motori molto grandi utilizzando la tecnica di segmentazione delle parti.
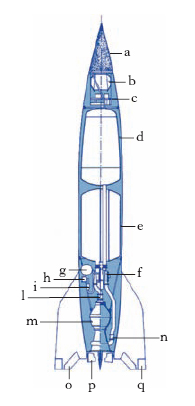
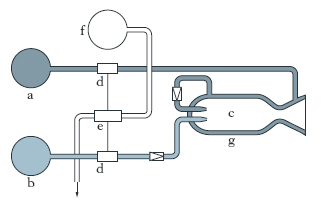
L’endoreattore a propellenti liquidi viene preferito nei casi di m. di grandi dimensioni in quanto consente impulsi specifici, e quindi spinte, molto elevati; altro vantaggio è la possibilità di spegnimento e riaccensione dei motori. Ciò permette, per es., di poter manovrare i satelliti in orbita nello spazio. Vi sono due tipi di propellenti liquidi: propellenti criogenici, che nelle condizioni ambientali sono allo stato gassoso e quindi, per il loro uso, debbono essere liquefatti; propellenti conservabili, che sono, in condizioni normali, allo stato liquido. I propellenti criogenici, di solito maggiormente impiegati per i più elevati impulsi specifici, comportano operazioni di lancio più lunghe: debbono essere infatti caricati poco prima della partenza per diminuire il più possibile le perdite dovute all’evaporazione. La struttura di un propulsore a propellenti liquidi è piuttosto complessa; oltre alla camera di combustione e all’ugello di scarico, essa comprende l’apparato di iniezione, il circuito di raffreddamento, i serbatoi e il sistema di alimentazione dei propellenti. L’iniettore è l’elemento più importante della camera di combustione, in quanto determina il rendimento e la stabilità della combustione stessa: esso deve introdurre nella camera di combustione i propellenti, controllandone la portata e nebulizzandoli al massimo per ottimizzare la combustione stessa. Il circuito di raffreddamento deve mantenere la temperatura entro i limiti sopportabili dalle pareti della camera di combustione e dell’ugello di scarico; si utilizza lo stesso propellente come refrigerante, in modo da non perdere il calore ceduto dalle pareti refrigerate. Per quanto riguarda l’immissione dei propellenti nella camera di combustione, si distinguono due sistemi di alimentazione. Nel sistema di alimentazione a pressione, il combustibile e il comburente a pressione di circa 30 bar sono spinti nella camera di combustione da aria compressa, a pressione di circa 300 bar, proveniente da un apposito serbatoio; l’alimentazione a pressione, necessitando anche di aria compressa, è usata soltanto per piccoli m., con fase propulsiva piuttosto breve. Nel sistema di alimentazione a pompa, già impiegato nel m. V2 (fig. 3), l’immissione del combustibile (a in fig. 4) e del comburente b nella camera di combustione c è ottenuta mediante due pompe d azionate dalla stessa turbina e, alimentata generalmente da una parte dei gas di combustione ovvero da un generatore di vapore f; il raffreddamento della camera di combustione è ottenuto facendo circolare il combustibile o il comburente nella camicia g. In questo sistema di alimentazione i serbatoi sono a bassa pressione (circa 3 bar) e quindi possono essere relativamente leggeri.
I propellenti liquidi più usati sono i bipropellenti: essi vengono miscelati nella camera di combustione, ma carburante e comburente sono mantenuti in due serbatoi separati. Per quanto riguarda i propellenti criogenici, tra gli ossidanti i più usati sono l’ossigeno liquido e il fluoro liquido, stabile ma corrosivo. Per quanto riguarda i propellenti conservabili i più usati come ossidanti sono: l’acido nitrico, il tetrossido di azoto (N2O4), il perossido di idrogeno (H2O2). I combustibili usati con gli ossidanti criogenici sono l’idrogeno liquido, l’etanolo, il cherosene, l’ammoniaca e varie forme di idrazina. Con gli ossidanti conservabili vengono usati come combustibili l’idrazina, i vari tipi di MAF (mixed amine fuels), la monometilidrazina. Gli impulsi specifici più elevati si ottengono con la miscela ossigeno liquido-idrogeno liquido (500 s); il motore principale dello Shuttle, per es., utilizza la suddetta miscela. Altra combinazione molto usata è N4O2–monometilidrazina, con un impulso specifico di 300 s.
Dinamica dei m. con propulsione a endoreattore
Considerando il caso di un m. monostadio che abbia una fase propulsiva di durata finita, il moto del m. può schematizzarsi in quello di un corpo con velocità iniziale pari a quella acquistata dal m. medesimo all’istante finale della fase di propulsione. Posto che, come precedentemente ricordato, la forza agente è la spinta S=Que, se, per semplicità, si trascurano la resistenza aerodinamica e l’azione della gravità, la legge fondamentale della dinamica fornisce mdv/dt= Que, essendo m la massa totale e v la velocità del m. al generico istante t; poiché è Q=−dm/dt, si può scrivere:
formula [1]
Supposta costante la velocità di efflusso e nulla la velocità iniziale (lancio da fermo), l’integrazione della [1] tra l’inizio e la fine della fase propulsiva dà per la velocità finale V del m. il valore:
formula

[2]
essendo m0 la massa iniziale e mf quella finale del m. (chiaramente, m0−mf è la massa utilizzata del propellente); il rapporto
formula [3]
è detto rapporto di massa. La velocità finale V è determinata pertanto dai valori delle velocità di efflusso e del rapporto di massa, quantità che sono entrambe limitate tecnologicamente: la prima dalla natura dei propellenti, e la seconda, oltre che dalla natura dei propellenti, anche dalla struttura generale del missile. Nei V2 si aveva per μ un valore di circa 3, per ue un valore di circa 2 km/s e quindi per V un valore di circa 2,2 km/s. Nei m. moderni, μ raggiunge valori ben più alti; tuttavia, anche nel caso di carichi utili percentualmente modesti non si va, grosso modo, oltre 10. Essendo ln10≅2,3, V è, all’incirca, il doppio di ue ed essendo ue, mediamente, dell’ordine di 2,5 km/s per gli usuali propellenti chimici, V è al massimo dell’ordine di 5 km/s. Questo è un valore limite teorico, che non tiene conto della resistenza del mezzo e dell’azione della gravità: per tener conto di tali grandezze, si fa riferimento al caso, particolarmente importante nella pratica, di un m. lanciato verticalmente; la [1] va scritta nella forma seguente:
formula [4]
dove g è l’accelerazione di gravità e R è la resistenza aerodinamica; indicando con τ la durata della fase propulsiva, si ha per la velocità finale il valore:
formula [5]

Il terzo addendo rappresenta il rallentamento dovuto alla resistenza aerodinamica: esso è inversamente proporzionale alla massa del missile. Il secondo addendo, ḡτ, dove ḡ è il valore medio dell’accelerazione di gravità nel tratto percorso durante la fase di propulsione, rappresenta il rallentamento dovuto alla gravità e può essere ridotto diminuendo la durata τ della propulsione. Si può dimostrare che tale durata è inversamente proporzionale alla sopportazione iniziale n0=S/m0g0. La sopportazione, rapporto fra spinta e peso, è una grandezza cui si fa riferimento per le questioni riguardanti la resistenza alle accelerazioni di materiali e di organismi viventi; se τ, a parità di ogni altro fattore, diminuisce, la sopportazione deve aumentare; inoltre la sopportazione cresce ulteriormente durante la propulsione, dal valore iniziale n0 al valore finale nf=μn0. La possibilità di diminuire il rallentamento per gravità riducendo la durata della fase propulsiva ha dunque un invalicabile limite legato al valore ammissibile per la sopportazione iniziale (che nel caso di uomini a bordo non deve superare il valore di circa 3). Occorre quindi attuare, caso per caso, un ragionevole compromesso tra i vari parametri in gioco. Si riporta comunque, nella fig. 5 l’andamento del rapporto V/ue, in funzione del rapporto di massa m0/mf per vari valori della sopportazione iniziale n0, in condizioni di trascurabile resistenza del mezzo: si ritrovano all’incirca i valori già dati per il caso teorico, e cioè non più di 5 km/s per V assumendo ue=2,5 km/s, μ≤10, n0≤3. È importante sapere quale quota e quale gittata corrispondano a tale velocità limite di un m. monostadio lanciato dalla superficie terrestre: nei due casi semplici, ma importanti, del lancio verticale e del lancio balistico ottimo (traiettoria ellittica con uno dei fuochi nel centro della Terra), trascurando, in prima approssimazione, la resistenza dell’atmosfera e l’effetto della rotazione terrestre, si ha per la quota massima H, nel lancio verticale,
formula [6]
e per la gittata massima s, nel lancio balistico ottimo,
formula [7]

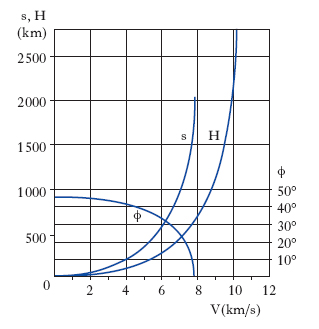
dove R0 è il raggio medio terrestre. In fig. 6sono riportati gli andamenti di H e di s in funzione di V, nonché l’angolo ottimo di proiezione, ϕ (pari a 45° per piccole gittate). Come si vede, H tende all’infinito per V≅11,2 km/s (velocità di fuga dalla Terra, o seconda velocità astronautica), mentre per ϕ=0° (lancio orizzontale) V≅7,9 km/s (velocità orbitale di un satellite su orbita circolare a quota zero, o prima velocità astronautica). Un m. animato da una velocità dell’ordine di 5 km/s non può superare, in queste condizioni ideali di massimo rendimento, una quota di circa 1000 km o una gittata di circa 3000 km. Ne segue che i m. per alte quote (e segnatamente quelli astronautici) e i m. per grandi gittate (per es., quelli militari intercontinentali) debbono essere necessariamente a più stadi. Nel caso di un m. a n stadi, tutti caratterizzati da uguale velocità di efflusso ue e da uguale rapporto di massa μ, per la velocità finale V si trova, a prescindere dai rallentamenti per gravità e per resistenza, l’espressione:
formula [8]

Anche tenendo conto della maggiore complicazione costruttiva, dalla relazione ora scritta risulta teoricamente superabile la seconda velocità astronautica con un m. a tre stadi, ognuno con ue=2,5 km/s e μ=5.
Numerosi studi tecnico-economici fissano a cinque il numero massimo ottimale di stadi; prevalentemente sono stati usati tuttavia m. a tre stadi. Nei m. polistadio il primo stadio detto booster, che è il più potente e deve fornire l’ingente spinta iniziale (si raggiungono decine di milioni di newton), è talvolta costituito da più propulsori identici raggruppati a fascio e funzionanti in parallelo (disposizione detta cluster); quando possibile, è previsto il recupero dei primi stadi, che sono allora provvisti di paracadute aprentisi automaticamente dopo l’esaurimento e il distacco dello stadio. Un’altra configurazione utilizzata, per es. nello Shuttle, e che diminuisce il rischio di non accensione degli stadi successivi, consiste nell’affiancare in parallelo tutti gli stadi accendendoli contemporaneamente, e nel distaccarli durante il volo man mano che terminano il propellente. La sequenza di accensione dà inoltre la possibilità di fermare la procedura di lancio se non è possibile accendere tutti i motori.
Una volta cessata l’azione propulsiva e raggiunta la velocità finale, il moto del m. è determinato dal valore, dalla direzione e dal verso di tale velocità, dall’attrazione terrestre (e, a grande distanza dalla Terra, anche di altri astri), dalla resistenza atmosferica (importante soltanto nel caso di m. a bassa quota). Conviene distinguere al riguardo tre categorie di m.: a) i m. per applicazioni astronautiche e quelli balistici; b) i m. guidati per usi bellici; c) i m. militari non guidati, o proiettili-razzo. Per i m. della prima categoria la traiettoria, governata dalle leggi della meccanica celeste, è una conica di cui il centro di massa della Terra occupa uno dei fuochi, e precisamente un arco di ellisse nei voli suborbitali (è il caso, per es., dei m. balistici), un’ellisse completa (eventualmente, una circonferenza) nei voli orbitali, una parabola o un’iperbole nei voli di allontanamento dalla Terra (verso la Luna o verso pianeti del sistema solare). La tecnica di volo consiste, schematicamente, in una prima fase, la fase di lancio, programmata automaticamente e controllata da terra, in cui il m. (più precisamente, il carico utile, in genere provvisto di propulsori ausiliari di governo) raggiunge le desiderate condizioni di quota, velocità e direzione, e in una successiva fase, la fase di volo, in cui si attuano le necessarie correzioni di rotta ed eventualmente operazioni più complesse, quali il passaggio da una traiettoria a un’altra, anche di tipo diverso (per es., il passaggio da un’orbita ellittica circumterrestre a un’orbita iperbolica di allontanamento). Tali correzioni sono impartite da terra (tracking) o da bordo, da un pilota automatico o da un astronauta; comunque il volo è essenzialmente governato da un sistema di guida inerziale, spesso integrato dalla radiolocalizzazione da parte di stazioni terrestri (guida radio-inerziale) e dal rilevamento automatico di determinate stelle particolarmente luminose (guida astronomico-inerziale): i sistemi di guida realizzati su tali basi sono sufficientemente precisi e hanno un alto grado di affidabilità. Notevolmente diverso è il caso dei m. guidati, non balistici, per uso bellico, il cui scopo è in generale quello di colpire un bersaglio mobile. Per tali m. il problema dinamico riguarda soltanto la fase di lancio, in cui l’apparecchio deve raggiungere la quota, la direzione e la velocità sufficienti per un efficace intervento dei sistemi che poi lo guideranno sul bersaglio. Assai più semplice è infine il terzo caso, quello dei proiettili-razzo, a traiettoria tesa, la cui dinamica è sostanzialmente simile a quella dei proiettili scagliati da armi da fuoco con elevata velocità iniziale, e quindi sostanzialmente governata dalle leggi dell’ordinaria balistica esterna.
Organi di stabilizzazione e governo
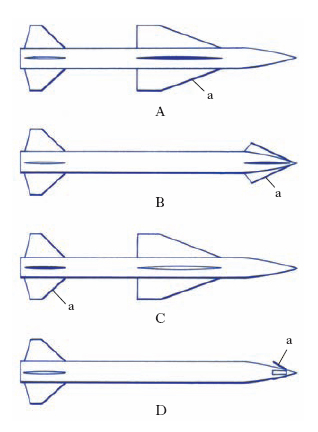
Tali organi costituiscono la parte finale del sistema di pilotaggio, al quale è affidato l’inserimento e il mantenimento di un m. nella traiettoria voluta; è infatti attraverso essi che l’autopilota, acquisendo da opportuni sensori i dati relativi al moto del m., ne comanda il volo. Per i m. che si muovono nella parte bassa dell’atmosfera, vengono utilizzati sistemi aerodinamici (fig. 7); i più usati sono formati da ali fisse e superfici di coda mobili, oppure da impennaggi di coda muniti di superfici fisse e mobili; i due sistemi possono essere integrati da alette mobili poste sul muso del missile. I sistemi di governo del m. non basati sulla utilizzazione di coppie aerodinamiche in genere si avvalgono della possibilità di orientare l’ugello di scarico (reso mobile, per es., da un’articolazione cardanica), oppure si avvalgono di deflettori disposti nell’ugello stesso. Altro sistema di controllo è quello effettuato con razzi vernieri, endoreattori a propellenti liquidi, specialmente utilizzati per inserire il m. in orbita o per variarla. I sensori utilizzati per le informazioni di volo necessarie all’autopilota sono giroscopi e accelerometri: i giroscopi misurano gli spostamenti angolari del m. rispetto a un sistema di riferimento fisso, mentre gli accelerometri misurano le accelerazioni trasversali da cui si ricavano gli spostamenti del m. rispetto al punto di lancio. Particolare attenzione va dedicata al rilevamento degli spostamenti del centro di gravità del missile.
Materiali impiegati nei missili
Requisito generale dei materiali per la costruzione di m., è quello di una grande leggerezza e, allo stesso tempo, di un’elevata resistenza a sollecitazioni meccaniche, termiche, fisico-chimiche. La struttura esterna deve essere sufficientemente rigida per resistere a forti carichi (termici e meccanici) che si hanno nel volo atmosferico: l’accelerazione alla partenza può essere decine di volte maggiore di quella di gravità e la temperatura che si sviluppa per il riscaldamento aerodinamico può raggiungere 500-600 °C nella fase di lancio e parecchie migliaia di °C nella fase di ritorno a terra da voli suborbitali o spaziali. I materiali generalmente usati sono leghe metalliche leggere, e precisamente le cosiddette leghe SAP, ottenute per sinterizzazione di polvere d’alluminio puro con una certa percentuale (8-15%) di ossido d’alluminio, ben resistenti sino a temperature di 600 °C: le leghe termoresistenti d’alluminio, più leggere delle precedenti ma utilizzabili sino a circa 200 °C; le cosiddette superleghe, a base di cobalto, cromo, nichel, molibdeno (vitallium, inconel, nimonic, hastelloy ecc.), resistenti sino a circa 800 °C; il titanio e le leghe a base di titanio, caratterizzate da un elevato rapporto tra carico di rottura e peso, presenza di un limite a fatica, elevata temperatura di fusione e ottima resistenza allo scorrimento viscoso (creep). Per la protezione delle parti esposte alle alte temperature che si hanno al rientro nell’atmosfera gli scudi termici sono realizzati in speciali sostanze (per es., resine fenoliche e fibre silicee) che disperdono calore con la sublimazione attraverso il processo di pirolisi (➔ ablazione).
Quanto ai materiali per la struttura interna, particolari problemi sorgono per la camera di combustione (temperatura dei gas circa 3000 °C, temperatura delle pareti circa 900 °C), gli ugelli di scarico, le alette di regolazione del getto; i materiali correntemente usati sono la grafite (punto di fusione 3700 °C), i materiali ceramici (per es., carburo di silicio sinterizzato con nitruro di silicio), e i materiali ceramico-metallici (i cosiddetti cermet), che uniscono alla duttilità e tenacia dei metalli la refrattarietà delle ceramiche (molto usati quelli a base di carburo di titanio cementato con leghe di nichel, cobalto e cromo). Nei m. a propellente solido, il contenitore del grano è normalmente di grafite; nei m. a propellenti liquidi, i serbatoi, le pompe, le tubazioni sono in genere d’acciaio inossidabile. Dove possibile, si utilizzano strutture cellulari (a nido d’ape) che, a parità di resistenza alle sollecitazioni, presentano una densità molto minore. È sempre più esteso l’utilizzo di materiali compositi costituiti da fibre di carbonio, di boro, di vetro e da matrici di resine organiche, per es. resine fenoliche, epossidiche, al silicone, oppure di materiali metallici o ceramici. Con i materiali compositi vengono costruiti pannelli mobili, pannelli solari, antenne, parte degli involucri esterni e coni terminali di razzi e missili.
Attrezzature per il lancio e per il controllo del volo
I piccoli proiettili razzo non richiedono attrezzature elettroniche di guida e per il lancio ci si serve o di lanciatori a rotaia (per es., per i m. Katjuša) o di dispositivi simili ai lancia-bomba (per es., per i Bazooka). Gli enormi vettori spaziali, che sono in genere a propellenti liquidi, richiedono attrezzature complesse e imponenti. La parte più vistosa di tali attrezzature è costituita dalla piattaforma (o rampa) di lancio, cioè da una robusta piattaforma sulla quale il m. viene disposto, poggiando su appositi sostegni, accanto a una o due torri provviste di bracci mobili per il rifornimento dei serbatoi, il controllo dei vari dispositivi, l’accesso eventuale di astronauti nei veicoli spaziali. Nelle vicinanze della piattaforma, in posizione protetta, sono sistemati i serbatoi dei propellenti e, eventualmente, apparecchiature per la produzione dei propellenti stessi (per es., dell’ossigeno liquido); in altra posizione protetta è sistemata la centrale operativa di lancio, provvista dei complessi dispositivi necessari per il controllo e il comando dell’operazione di lancio, che può durare anche qualche decina di ore; alla centrale di lancio fanno capo anche le stazioni, vicine e lontane, per la rilevazione della traiettoria (tracking) e per la ricetrasmissione delle informazioni relative sia al volo sia alla missione del volo (telemetria e teleguida). Il complesso di tutte queste attrezzature, al servizio di una o più piattaforme di lancio, costituisce il poligono di lancio o base di lancio (nel caso di poligoni per il lancio di m. spaziali si parla di poligono spaziale, base spaziale, cosmodromo).
I m. per usi bellici, ICBM (inter-continental ballistic missile) e IRBM (intermediate range ballistic missile) sono in genere alloggiati, per ragioni di sicurezza, in stazioni interrate e protette (silos), nelle quali trovano posto anche le apparecchiature di lancio e di controllo del volo. Per i m. guidati tattici (antinave, contraerei ecc.) si usano normalmente dispositivi di lancio, fissi o mobili, dotati della possibilità di rotazione ed elevazione, spesso costituenti impianti multipli.
Principali tipi di missili per usi pacifici
I m. per usi non militari possono dividersi in due principali categorie: m. atmosferici per ricerche geofisiche e astrofisiche (detti anche m. sonda o razzi sonda) e m. per applicazioni spaziali e astronautiche (vettori spaziali). I primi sono destinati a portare ad alta quota, in voli verticali o quasi verticali, strumenti scientifici (di massa relativamente modesta) per scopi meteorologici, aerologici e simili; i secondi, che devono raggiungere velocità comprese tra la prima e la seconda velocità astronautica e velocità maggiori di quest’ultima, sono destinati a immettere in orbita satelliti artificiali terrestri per i più vari scopi (fisica spaziale, meteorologia, telecomunicazioni ecc.), sonde spaziali e astronavi: essi si sono sviluppati rapidamente a partire dal 1957-58 e impegnano la maggior parte delle risorse in questo campo. A lungo la ricerca in questo campo è rimasta appannaggio di USA e URSS, oggi i protagonisti dello scenario internazionale sono numerosi.
M. degli Stati Uniti d’America. Le prime ricerche di una certa rilevanza, condotte nel 1945-46 con V2 preda bellica, fecero raggiungere nel poligono di White Sands (New Mexico) quote intorno a 180 km. Nel 1946 fu realizzato il Viking, monostadio a propellenti liquidi; nel 1949 il primo m. bistadio, il Bumper, che raggiunse quote intorno a 400 km. Sul finire degli anni 1950 furono realizzati due m. di nuovo progetto, il WAC-Corporal, lungo circa 3,5 m e quota di circa 70 km, e l’Aerobee, lunghezza 9,4 m e quota massima da 200 a 300 km. Dopo un fallimento nel 1954, nel 1958 fu lanciato con successo il vettore spaziale Vanguard, e nello stesso anno uno Jupiter C modificato a quattro stadi lanciò il satellite Explorer (di 14 kg). Alla competizione tra satelliti degli USA e dell’URSS fece seguito quella tra capsule spaziali: l’URSS otteneva m. con spinte più elevate al lancio riunendo più motori, gli USA sviluppando motori di sempre maggiore spinta: dalla serie dei Thor si passò alla serie degli Atlas e a quella dei Titan (che misero in orbita la capsula Gemini) e infine a quella dei Saturn. Nel 1969, con lo sbarco degli astronauti N. Armstrong e E. Aldrin sulla Luna, gli USA poterono ritenere di aver concluso la loro rincorsa nei confronti dell’URSS.
Frutto di un’ulteriore fase della produzione furono il vettore Delta e il sistema di trasporto spaziale Shuttle, realizzato per recuperare i diversi componenti di altissimo costo e composto da un corpo orbitante di forma aerodinamica per il rientro e l’atterraggio su pista normale, di un serbatoio esterno che contiene il propellente liquido per i motori principali installati sul corpo orbitante per la messa in orbita del corpo stesso e di due propulsori a propellente solido, utilizzati nella prima fase di lancio, che sono provvisti di paracadute per il successivo recupero in mare; la massa totale del sistema è di 2037 t con una spinta al decollo di ben 31.000.000 N che inserisce in un’orbita circolare a 277,8 km di quota un carico utile di 29 t.
Negli anni 1980 negli Stati Uniti si pensava di affidare quasi esclusivamente allo shuttle il compito di mettere in orbita i satelliti. La tragedia della navetta Challenger nel 1986, bloccando il programma spaziale, impose di tornare ai m. e fu dato nuovo impulso alla costruzione dei Delta, dei Titan ecc., ottenendo, fra l’altro, un guadagno in affidabilità e potenza di lancio. Per raggiungere prestazioni più elevate sono stati adottati propellenti che consentono un maggiore impulso specifico, in particolare idrogeno e ossigeno liquidi, nonostante le grandi difficoltà connesse alle bassissime temperature necessarie per la relativa liquefazione; l’aumentata spinta dei singoli stadi ha inoltre portato a una diminuzione del numero degli stadi stessi. Attualmente dei vettori di cui l’US air force si serve per lanciare, dal Centro spaziale Kennedy o da Vanderberg, satelliti per navigazione e da ricognizione, Delta 2 (McDonnell-Douglas aerospace), costituito da 9 booster e da successivi 3 stadi, può mettere in orbita geostazionaria satelliti di 1182 kg e satelliti GPS di 2141 kg, e in orbita terrestre bassa (185 km) satelliti di 7920 kg di massa; il Delta 4, entrato in servizio nel 2002, è formato da un primo stadio centrale (al quale possono essere accoppiati altri due corpi uguali) con un motore alimentato a idrogeno e ossigeno liquidi; può portare in orbita bassa fino a quasi 23 t nella versione Heavy e in orbita geostazionaria fino a 12.980 kg.
M. dell’URSS. Pochissime informazioni si avevano sui m. atmosferici e spaziali dell’URSS, dove la politica missilistica fu sempre indirizzata verso l’utilizzazione di primi stadi militari già sviluppati, integrati dagli opportuni stadi finali suggeriti dalla specifica applicazione: così per le missioni dei satelliti Cosmos furono usati primi stadi derivati dai m. balistici militari a propellente liquido (SS 4, SS 6, SS 9). Allo stesso modo, i m. per i lanci delle navicelle spaziali Sojuz utilizzarono stadi predisposti per i m. balistici e furono direttamente ricavati da quelli delle prime astronavi Vostok, aumentandone l’altezza di circa 12 m, derivata dall’aggiunta di un ulteriore stadio. Il primo grande vettore noto è stato appunto quello usato per il lancio delle astronavi Vostok. I m. usati per lanciare le astronavi Voschod furono simili, ma con spinta tre volte maggiore.
La Russia nel 2001 ha lanciato per la prima volta con successo una versione potenziata di Proton, appartenente a una famiglia di vettori spaziali nati negli anni 1960 in URSS come lanciatori per le testate nucleari.
M. di altre nazioni. La maggiore realizzazione missilistica, dopo quelle di USA e URSS, è rappresentata dai razzi vettori Ariane. Il progetto, partito ufficialmente nel 1973, rappresentava il secondo tentativo dell’Europa di munirsi di un proprio lanciatore dopo il fallimento del precedente Progetto Europa. L’Ariane è stato sviluppato dall’Agenzia Spaziale Europea (➔ ESA), ma la progettazione e la costruzione dello stesso furono affidate alla compagnia francese Arianespace. I vettori Ariane sono lanciati dal Centre Spatial Guyanais di Kourou nella Guyana francese. Sono state sviluppate 5 versioni successive dell’Ariane. Ariane 1 era un vettore a tre stadi, del peso di 210 t, in grado di immettere in orbita geostazionaria un carico utile di 1850 kg. Le versioni seguenti, Ariane 2 e Ariane 3 (praticamente identici, con la sola differenza di motori aggiuntivi di cui fu equipaggiato Ariane 3) puntarono a incrementare la spinta e la capacità di trasporto del carico utile (fino a 2175 kg per il primo e 2700 kg per il secondo). Fino al 1989 ci furono soltanto 6 lanci di Ariane 2 e 11 di Ariane 3. La costante ricerca di un miglioramento delle prestazioni portò allo sviluppo della successiva versione, Ariane 4, iniziata nel 1983 e il cui primo lancio avvenne il 15 giugno 1988. Il ben più potente Ariane 4, sviluppato in sei versioni differenti, è diventato il lanciatore di base per l’immissione in orbita dei satelliti europei, garantendo la possibilità di trasporto di un carico utile di 4800 kg. L’ultima versione dei lanciatori Ariane è Ariane 5 (alto 54 m, massa al lancio di 710 t), per il quale l’ESA ha allestito un’apposita stazione di lancio nella base di Kourou nella Guyana francese. Il suo primo lancio riuscito risale al 1997, mentre la prima missione operativa è del dicembre 1999. Mentre l’Ariane è il vettore standard per il lancio dei grandi satelliti europei in orbita geostazionaria, il suo utilizzo per il lancio dei satelliti per l’osservazione terrestre e la meteorologia, di massa intorno ai 1500 kg utilizzati, è economicamente non conveniente. Per questo motivo l’ESA ha sviluppato in collaborazione con l’Agenzia Spaziale Italiana il vettore VEGA (Vettore Europeo di Generazione Avanzata), ideato per l’immissione in orbita polare bassa (inclinata di 90° rispetto all’equatore a una quota di 700 km) di carichi utili di massa modesta, compresa tra i 300 e i 2000 kg: è un vettore costituito da un corpo unico composto di 4 stadi per un altezza totale di circa 27 m e una massa al lancio di 128 t.
Per quanto riguarda il Giappone, dopo il m. Mu (quattro stadi per satelliti da circa 20 kg), è stata sviluppata la serie N, in particolare la versione N-2, m. tristadio lungo circa 40 m, con massa di circa 135 t e un carico utile di 2 t. Anche la Cina ha immesso propri satelliti in orbita grazie al m. bistadio FB-1 di 32 m di lunghezza e 190 t di massa, con un carico utile di 2 t circa (spinta iniziale di 2.800.000 N). Infine, si ricorda il m. indiano SLU-3, a 4 stadi, con propellente solido, di 24 m d’altezza con una massa al decollo di 17 t e spinta iniziale di 430.000 N.
M. per usi militari
Classificazione e caratteristiche principali. I m. per uso militare sono distinti in tre categorie, a seconda della gittata: m. tattici (fino a 1000 km), m. di teatro (tra 1000 e 5500 km), m. strategici (oltre 5500 km). In base all’ambiente di partenza e a quello di arrivo si hanno inoltre: m. superficie-superficie o terra-terra (surface-to-surface missile, SSM); m. superficie-aria o terra-aria (surface-to-air missile, SAM), detti anche intercettori teleguidati; m. aria-superficie o aria-terra (air-to-surface missile, ASM); m. aria-aria (air-to-air missile, AAM); m. sottomarino-superficie o acqua-terra (underwater-to-surface missile, USM), lanciati da un sottomarino immerso verso un bersaglio in superficie; m. sottomarino-aria o acqua-aria (underwater-to-air missile, UAM), lanciati da un sottomarino immerso verso un bersaglio nell’atmosfera. All’elenco possono essere aggiunti i m. subacquei, i quali però non sono corpi volanti, ma dispositivi idrodinamici.
Un’altra distinzione, che fa riferimento al modo di operare, è quella tra m. balistici, m. orbitanti, m. guidati e m. non guidati.
I m. balistici sono m. superficie-superficie destinati a percorrere una traiettoria suborbitale, portando una testata con una o più cariche esplosive nucleari. La denominazione deriva dal fatto che alcuni tratti delle traiettorie sono soggette alle pure leggi della balistica; in genere questi congegni sono autoguidati essendo dotati di un sistema di guida inerziale. Inoltre, a seconda del tipo di organizzazione per il rientro negli strati bassi dell’atmosfera e lo spargimento sul bersaglio, o sui bersagli, delle testate nucleari trasportate, alcuni m. sono denominati: m. a testate multiple (MRV, multiple reentry vehicle); m. a testate multiple a obiettivi indipendenti (MIRV, multiple independent targeted reentry vehicle); m. a testate manovrate (MARV, manouvering reentry vehicle).
I m. orbitanti sono vettori spaziali, i quali immettono su un’orbita circumterrestre un veicolo contenente una o più cariche nucleari, lanciate su comando da terra, verso determinati obiettivi nemici (FOBS, fractional orbital bombardment system).
I m. guidati sono destinati a colpire bersagli, generalmente mobili, a relativamente breve distanza (da qualche centinaio di metri a qualche decina di chilometri) e, a seconda del tipo di bersaglio, si distinguono ulteriormente in m. controcarro, contraerei, antinave, antimissile.
I m. non guidati comprendono invece tutta la vasta categoria di ordigni esplosivi lanciati mediante un propulsore a getto ma peraltro sprovvisti di sistemi di guida: tipici sono i proiettili razzo (Katjuša, Bazooka ecc.) e le bombe a razzo non guidate (o bombe volanti).
Sistemi di guida sul bersaglio. - Il complesso dei mezzi occorrenti per dirigere sul bersaglio un m. guidato può essere raggruppato in due principali unità: il dispositivo di localizzazione del bersaglio, che determina, istante per istante, la posizione del bersaglio relativamente al m., e il dispositivo di pilotaggio, che, sulla base dei dati forniti dal precedente, modifica opportunamente la traiettoria del m. dirigendola sul bersaglio. Il dispositivo di pilotaggio (detto anche autopilota) è installato sul m., ed è sostanzialmente un servosistema. L’assetto degli organi di controllo (alettoni, deflettori del getto ecc.) è autoregolato su un programma prestabilito e viene successivamente modificato dall’autopilota sulla base dei dati via via forniti dal sistema di localizzazione.
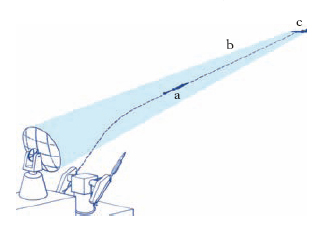
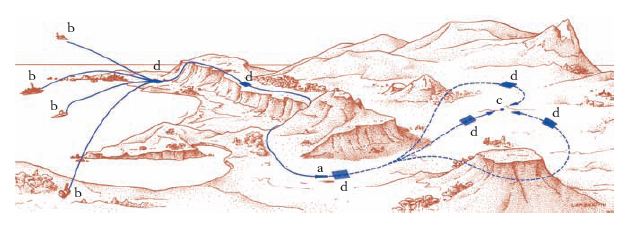
I sistemi di guida dei m. si possono suddividere in due classi, a seconda che il bersaglio sia visibile, oppure non visibile dai mezzi di intercettazione. La prima classe (bersaglio visibile) è formata dai sistemi a comando, a fascio direttore e ad autoguida. Nel sistema a comando il m. riceve dall’esterno gli ordini in base ai quali segue la traiettoria desiderata. Il sistema a fascio direttore (fig. 8) si basa sul principio di mantenere costantemente il m. a (m. teleguidato) all’interno di un fascio b sempre puntato contro il bersaglio c; il fascio può avere origine da un radar, oppure, per distanze minori, essere costituito da un raggio laser. L’autoguida (homing) è un sistema di guida interamente installato a bordo del m. che riceve le informazioni necessarie direttamente dal bersaglio. A seconda di come i dati di guida vengono acquisiti, si distinguono m. con autoguida passiva, attiva e semiattiva. La seconda classe di sistemi di guida (bersaglio non visibile) comprende i sistemi di guida autonomi, fra cui i più diffusi sono i sistemi di guida inerziale, che hanno il vantaggio di essere immuni dalle interferenze esterne. Le apparecchiature di guida inerziale comprendono: a) due o tre accelerometri, con assi di misura ortogonali fra di loro; b) un sistema di riferimento (costante durante il volo del m., oppure solidale a esso) che permette di conoscere in ogni istante l’orientamento degli accelerometri nello spazio; c) un elaboratore elettronico che, in base al valore e alla direzione dell’accelerazione, ricava velocità e posizione del missile. Un sistema di guida inerziale ‘puro’, in cui cioè non siano introdotti elementi correttivi rilevati a mezzo di misure eseguite all’esterno del sistema stesso, fornisce informazioni di velocità e posizione con errori che tendono a crescere con il tempo. Per diminuire il valore dell’errore sono stati realizzati sistemi ibridi: questi ultimi incorporano un secondo sistema che rileva esternamente i dati di velocità e di posizione e li confronta con i dati elaborati dal sistema inerziale correggendone gli errori. Accanto alla guida inerziale e a essa accoppiabile si è realizzato il sistema di posizionamento globale (➔ GPS). Un altro sistema di guida autonoma è quello a confronto con il contorno del terreno (TERCOM, TERrain COntour Matching; fig. 9); questo sistema, utilizzato sui m. Cruise, guida il m. a, lanciato dalle basi b, verso il bersaglio c, confrontando, mediante un radioaltimetro, il profilo altimetrico del terreno sorvolato con quello delle mappe d memorizzate nel sistema di guida.
La precisione di colpire di un missile, e cioè l’efficacia del suo sistema di guida, è data per convenzione dal valore del suo cerchio di eguale probabilità (CEP, circle of equal probability) e cioè dalla lunghezza in metri del raggio del cerchio avente il centro sul bersaglio entro il quale il m. ha il 50% di probabilità di cadere.